5.4.5.2. A spring system with 2 DOF
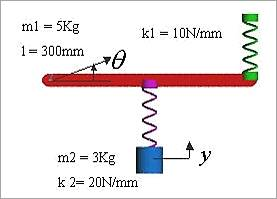
Figure 5.21 A spring model
A spring model shown in Figure 5.21 is a system with two DOF, and the system has two masses, joints and spring entities. Their material properties, spring and damping coefficients are shown in Table 5.5.
Mass1 |
5Kg |
Mass2 |
3Kg |
Length of m1 |
300 mm |
Stiffness coefficient (k1) |
10 N/mm |
Stiffness coefficient (k2) |
20 N/mm |
Damping coefficient (C1) |
0 N sec/mm |
Damping coefficient (C2) |
0 N sec/mm |
If the rotational angle \(\theta\) is small, the equation of motion of the system can be derived as:
Substituting the values in Table 5.5, (5.37) becomes
The analytic natural frequencies of (5.38) are
The eigenvalues of this spring system are validated in Table 5.6.
Mode Number |
Undamped Natural Frequency (Hz) |
|
RecurDyn/Eigenvalue |
Analytic solution |
|
1 |
9.01862E+00 |
9.019 |
2 |
1.77621E+01 |
17.76 |