7.4.1. Body
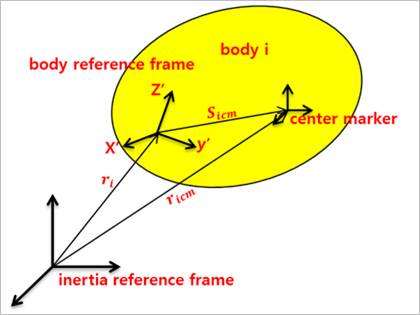
Figure 7.89 Kinematic relationship for plot data of body
Pos_TM: The magnitude of the translational displacement of the center marker in the inertia reference frame.
Pos_TX, Pos_TY, Pos_TZ: The x, y, and z components of the translational displacement of the center marker in the inertia reference frame.
\(\mathbf{r}_{icm}=\mathbf{r}_+\mathbf{s}_{icsm} = \mathbf{r}_i+\mathbf{A}_i\mathbf{s}_{icm}'\)
Pos_PSI, Pos_THETA, Pos_PHI: The 3-1-3 Euler angle of the center marker measured in the inertia reference frame.
\(\mathbf{A}_{icm}=\mathbf{R}_z(\theta)\mathbf{R}_x(\theta)\mathbf{R}_z(\psi)\)
Pos_YAW, Pos_PITCH, Pos_ROLL: The 3-2-1 Euler angle of the center marker measured in the inertia reference frame.
\(\mathbf{A}_{icm}=\mathbf{R}_z(\theta_{yaw})\mathbf{R}_x(\theta_{pitch})\mathbf{R}_z(\theta_{roll})\)
Vel_TM: The magnitude of the translational velocity of the center marker in the inertia reference frame.
Vel_TX, Vel_TY, Vel_TZ: The x, y, and z components of the translational velocity of the center marker in the inertia reference frame.
\(\dot{\mathbf{r}}_{icm}=\dot{\mathbf{r}}_i+\mathbf{A}_i\tilde{\mathbf{\omega}_i} \mathbf{s}_{icsm}' = \mathbf{A}_i\dot{\mathbf{r}}_i+\mathbf{A}_i \tilde{\mathbf{\omega}_i}\mathbf{s}_{icm}'\)
Vel_RM: The magnitude of the angular velocity of the center marker in the inertia reference frame.
Vel_RX, Vel_RY, Vel_RZ: The x, y, and z components of the angular velocity of the center marker in the center marker reference frame.
\(\mathbf{\omega}_i'=\mathbf{A}^T \cdot \mathbf{\omega}_i\)
Acc_TM: The magnitude of the translational acceleration of the center marker in the inertia reference frame.
Acc_TX, Acc_TY, Acc_TZ: The x, y, and z components of the translational acceleration of the center marker in the inertia reference frame.
\(\ddot{\mathbf{r}}_{icm}=\mathbf{A}_i\ddot{\mathbf{r}}_i' + \mathbf{A}_i\tilde{\mathbf{\omega}_i}'\dot{\mathbf{r}}_i' + \mathbf{A}_i\tilde{\mathbf{\omega}_i}'\tilde{\mathbf{\omega}_i}'\mathbf{s}_{icsm}'+\mathbf{A}_i\tilde{\dot{\mathbf{\omega}}}_i'\)
Acc_RM: The magnitude of the angular acceleration of the center marker in the inertia reference frame.
Acc_RX, Acc_RY, Acc_RZ: The x, y, and z components of the angular acceleration of the center marker in the center marker reference frame.
\(\dot{\mathbf{\omega}}_i'=\mathbf{A}^T \cdot \dot{\mathbf{\omega}}_i\)
KineticEnergy: The Kinetic energy of the center marker with respect to the inertia reference frame.
\(K=\frac{1}{2}m{{v}^{2}}\)
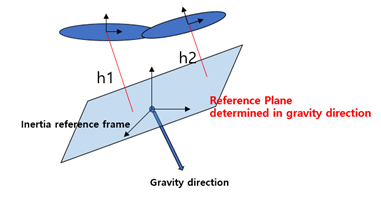
PotentialEnergy: The Potential energy of the center marker with respect to the inertia reference frame.
\(P=mgh\)