27.3.2.1. Contact Parameter between Ground and Shoe
The user can define a contact parameter between ground and shoe. If Pressure-Sinkage function is not checked, the ground is the rigid type.
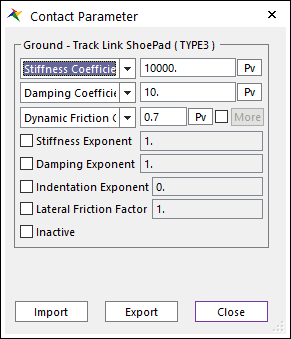
Figure 27.55 Contact Parameter dialog box
The track links are subjected to large contact forces as the result of the interaction with the Track Link Shoe and the Ground. Contact parameters consist of stiffness, damping, and friction coefficients. The contact forces are computed based on the contact parameters provided. Refer to Contact Page.
Lateral Friction Factor: Defines the lateral friction factor. If this option is checked, fiction force for lateral direction is magnified by this factor.
Inactive: Check the active or inactive for contact.