6.3.1.3. Force Page
The user can define the magnitude and direction of force for the force entity. This page differs according to each force entity type.
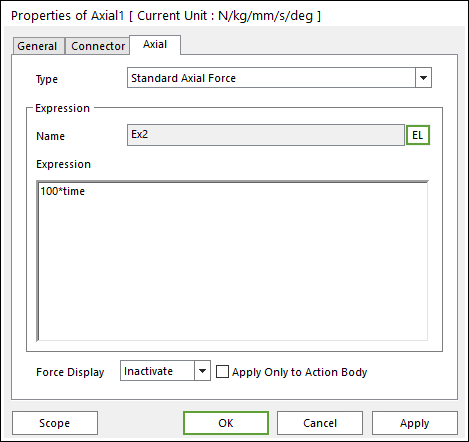
Figure 6.243 Force property page [Force page]
Type: Choose the type to input the force as Standard or User Subroutine.
Expression: Creates an expression of a force. If the user defines the expression, the substance of the expression is shown in the text box.
Force Display: Graphically displays the resultant force vector on Working Window. The displayed force can be defined as shown in Figure 6.244.

Figure 6.244 Definition of force
Inactive: The graphical force display is inactivated.
Action: The force and torque which are generalized on the force marker of the action body by a force are displayed at the position. The displayed force can be defined as the following equations.
Plate force
\({\mathbf{Q}_{a1}}=\left\{ \begin{matrix} {\mathbf{f}_{a1}} \\ {{\mathbf{\tau} }_{a1}} \\ \end{matrix} \right\},{\mathbf{Q}_{a2}}=\left\{ \begin{matrix} {\mathbf{f}_{a2}} \\ {{\mathbf{\tau}}_{a2}} \\ \end{matrix} \right\},{\mathbf{Q}_{a3}}=\left\{ \begin{matrix} {\mathbf{f}_{a3}} \\ {{\mathbf{\tau} }_{a3}} \\ \end{matrix} \right\}\)
Tire force: The displayed force is a generalized force on the tire marker by tire contact force.
\({\mathbf{Q}_{a1}}=\left\{ \begin{matrix} {\mathbf{f}_{b}} \\ {{\mathbf{\tau} }_{b}}+{{{\tilde{s}}}_{ba}}{\mathbf{f}_{b}} \\ \end{matrix} \right\}\)
Others
\({\mathbf{Q}_{a}}=\left\{ \begin{matrix} {\mathbf{f}_{a}} \\ {{\mathbf{\tau} }_{a}} \\ \end{matrix} \right\}\)
Base: The force and torque which are generalized on the force marker of the base body by a force are displayed at the position. The displayed force can be defined as the following equations.
Spring, Rotational Spring, Axial, Translational, Rotational, and Screw forces
\({\mathbf{Q}_{b}}=\left\{ \begin{matrix} {\mathbf{f}_{b}} \\ {{\mathbf{\tau}}_{b}} \\ \end{matrix} \right\}=\left\{ \begin{matrix} -{\mathbf{f}_{a}} \\ -{{\mathbf{\tau}}_{a}} \\ \end{matrix} \right\}\)
Bushing, Beam, and Matrix forces
\({\mathbf{Q}_{b}}=\left\{ \begin{matrix} {\mathbf{f}_{b}} \\ {{\mathbf{\tau}}_{b}} \\ \end{matrix} \right\}=\left\{ \begin{matrix} -{\mathbf{f}_{a}} \\ -{{\mathbf{\tau} }_{a}} \\ \end{matrix} \right\}\)
Plate force
\({\mathbf{Q}_{b}}=\left\{ \begin{matrix} {\mathbf{f}_{b}} \\ {{\mathbf{\tau}}_{b}} \\ \end{matrix} \right\}=\left\{ \begin{matrix} -{\mathbf{f}_{a}} \\ -{{\mathbf{\tau}}_{a}}-{{{\tilde{\mathbf{d}}}}_{ba}}{\mathbf{f}_{a}} \\ \end{matrix} \right\}\)
Tire force: None
Both: This simultaneously displays the action and reaction forces at the positions of the force markers of each body.