32.2.7. Torsional Damper
A torsional damper is a group which is composed of three bodies, one rotational spring damper and two joints.
Three bodies are axle, hub and ring. Ring body and hub body are connected with one rotational spring damper and one revolute joint. Axle body and hub body are connected with the fixed joint.
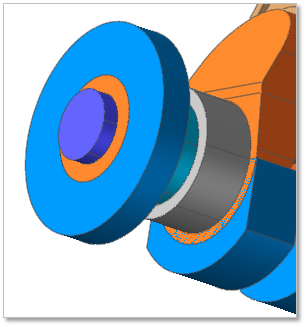
Figure 32.83 Torsional Damper
Terminology
Reference Parametric Marker
Width
Axle Length
Hub Inner Diameter
Hub Outer Diameter
Ring Inner Diameter
Ring Outer Diameter
32.2.7.1. Modeling Options
Click the Damper icon of the Crank group in the Crank tab. The user can see the Crank Component – TorsionalDamper dialog box.
The user can select the position where a torsional damper is created in Component Index.
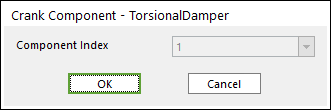
Figure 32.84 Crank Component – TorsionalDamper dialog box
Click OK.
32.2.7.2. Properties
Click the right mouse button on the torsional damper body to choose Properties of torsional damper. The user can modify the property of torsional damper in the following dialog.
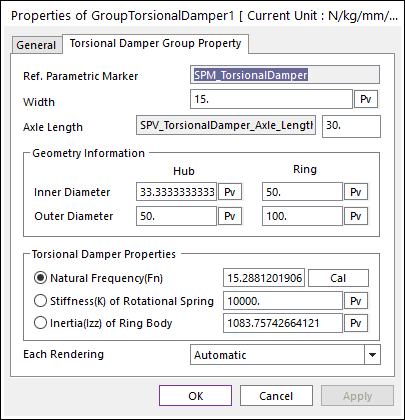
Figure 32.85 Torsional Damper property page
Reference Parametric Marker: Controls the position of torsional damper. It is also the special parametric marker.
Geometry Information
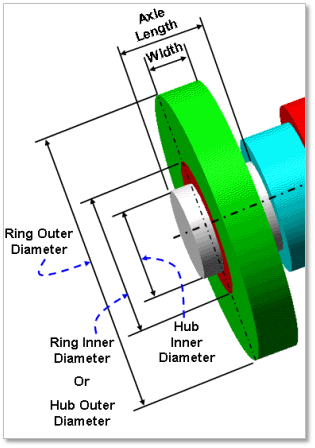
Figure 32.86 Geometrical information of Torsional Damper
Torsional Damper Properties
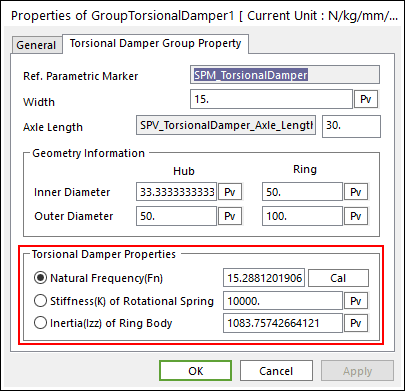
Figure 32.87 Torsional Damper Property
\(\omega_n=2 \times \pi \times f_n\)
An example in the above dialog
Select the Natural Frequency (Fn) option.
Change the values of Stiffness of Rotational Spring and Inertia (Izz) of Ring Body as follows.
And then Click Cal to get the new value of natural frequency
Each Rendering: The selected mode can be displayed in Each Render mode.
Connection Information of Torsional Damper
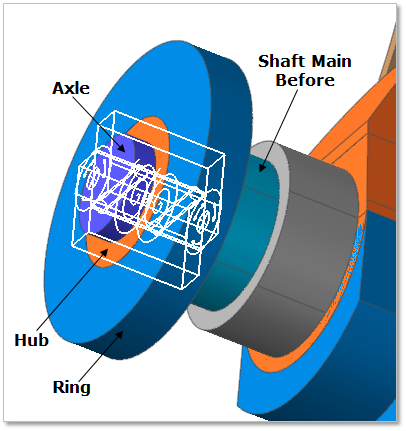
Figure 32.88 Connection Information
Ring and Hub are connected by Revolute Joint with Rotational Spring / Damper.
Hub and Axle are connected by Fixed Joint.
Axle and Shaft Main Before are connected by Fixed Joint.