20.6.5.9. PID(z)
The PID Controller block implement a discrete-time controller.
Forward Euler:
\({{z}_{ploe}}=1-N{{T}_{s}}\)
Backward Euler:
\({{z}_{ploe}}=\frac{1}{1+N{{T}_{s}}}\)
Trapezoidal Euler:
\({{z}_{ploe}}=\frac{1-N{{T}_{s}}/2}{1+N{{T}_{s}}/2}\)
Dialog box
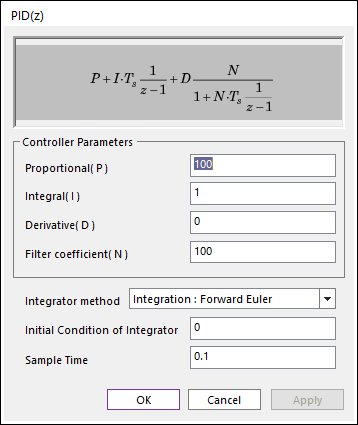
Figure 20.90 PID(z) dialog box
Parameter(s) |
Description |
Proportional(P) |
Enter the proportional gain P. |
Integral(I) |
Enter the integral gain I. |
Derivative(D) |
Enter the derivate gain D. |
Filter coefficient(N) |
Enter the filler coefficient N, which determines the pole location of the filter in the derivate action. |
Integrator method |
Select an integration or accumulation method. For more information, refer to Discrete Time Integrator. |
Initial Condition of Integrator |
Enter the integrator initial value. |
Sample time |
Enter the time interval between samples. |