6.4.1.5. Contact Page
This page specifies base and action geometries to contact. The contact surface is defined by using several parameters. This page differs according to each contact entity.
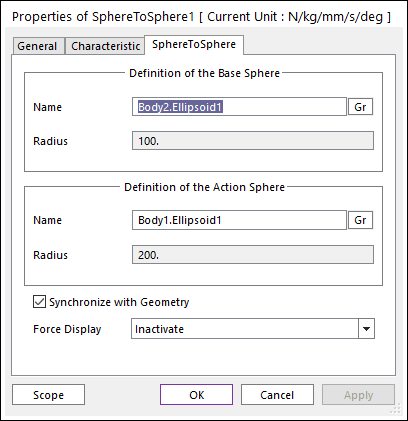
Figure 6.309 Contact property page [Contact page]
Definition of the Base Surface: Select the base contact geometry. The entities vary according to the each contact force type.
Definition of the Action Surface: Select the action contact geometry. The entities vary according to the each contact force type.
Force Display: Graphically displays the resultant force vector on the view window.
Inactive: The force graphical display is inactivated.
Action: The force and torque which is generalized on the center marker or contact point of the action body by a specified contact force is displayed at the position. The displayed force can be as following equation.
\({\mathbf{Q}_{a}}=\left\{ \begin{matrix} {\mathbf{f}_{a}} \\ {\mathbf{\tau}_{a}} \\ \end{matrix} \right\}=\left\{ \begin{matrix} {\mathbf{f}_{n}} -{\mathbf{f}_{l}} \\ {{{\tilde{\mathbf{s}}}}_{ac}} \left ( {\mathbf{f}_{n}} + {\mathbf{f}_{l}} \right ) \\ \end{matrix} \right\}\)
Base: The force and torque which is generalized on the center marker or contact point of the base body by a specified contact force is displayed at the position. The displayed force can be as following equation.
\({\mathbf{Q}_{b}}=\left\{ \begin{matrix} {\mathbf{f}_{b}} \\ {\mathbf{\tau}_{b}} \\ \end{matrix} \right\}=\left\{ \begin{matrix} -{\mathbf{f}_{a}} \\ -{\mathbf{{\tau}}_{a}}-{{{\tilde{\mathbf{d}}}}_{ba}}{\mathbf{f}_{a}} \\ \end{matrix} \right\}\)
Both: This simultaneously display the action and reaction forces at the positions of the center markers or contact point of each body. If the mother body of contact geometry is ground, the displayed force vector can be not significant.
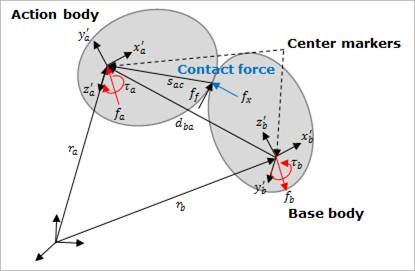
Figure 6.310 Definition of contact force
Note
If the mother body of contact geometry is ground, the displayed force vector can be not significant.