6.2.4.2. CVCV
A cvcv joint can do modeling a continuous contact model between two curves. It has the rotation degrees of freedom as the constrained point.
6.2.4.2.1. Modeling Options
The user can create a joint entity as follows.
Curve, Curve, Point
Curve: Selects a base curve.
Curve: Selects an action curve.
Point: Selects a point to define the location of cvcv joint.
6.2.4.2.2. Properties
The user can define initial conditions and friction force using the Joint page.
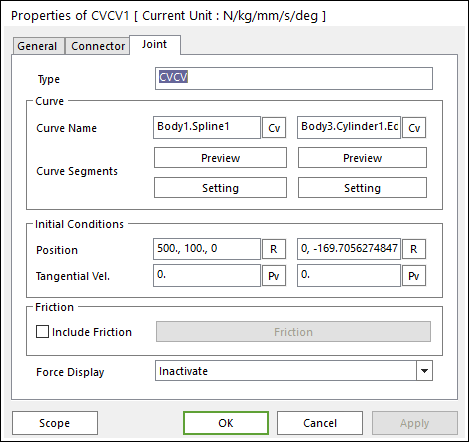
Figure 6.233 CVCV property page [Joint page]
Type: Shows the type of joint.
Curve: The two curves must be in the same plane. If two curves are straight lines, an error occurs because plane normal cannot be obtained. (Error code: C000917)
Curve: Changes the curve by using Cv.
Preview for Curve Segment: Shows the segments of the curve by clicking Preview.
Setting for Curve Segments: Access Base Curve Segment dialog box. For more information, click here.
Initial Conditions
Position: Changes the initial point position on the curve.
Tangential velocity: Tangential velocity along the curve is defined.
Friction
Include Friction: If this option is checked, the friction force can be defined for the cvcv joint. Only the Sliding type is supported. For more information, click here.
Force Display: Displays the resultant force vector graphically on Working Window.