6.2.1.3. Joint Page
The user can define the motion, initial conditions, and friction for the joint. This page differs according to each joint type.
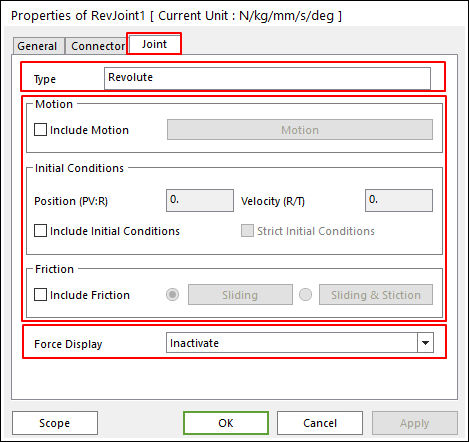
Figure 6.139 Joint property page [Joint page]
Type: Shows the type of joint.
Motion
Include Motion: Create a motion of the joint. Refer to Motion.
Initial Conditions
Include Initial Conditions: If checked, enables the user-specified initial conditions (position and velocity).
Position (PV:R): Defines the initial relative position difference of the joint. The relative position difference can be an angular difference or a translational position difference between 2 markers, depending on the joint type.
Velocity(R/T): Defines the initial relative velocity difference of the joint. The relative velocity difference can be an angular velocity difference or a translational velocity difference between 2 markers, depending on the joint type.
Strict Initial Conditions: Indicates that the initial condition settings should be strictly enforced. This can only be selected if Include Initial Conditions is also selected. Only Revolute, Translational, and Cylindrical joints support this function.
The initial conditions are not guaranteed to be satisfied unless Strict Initial Conditions is selected. Initial Conditions cannot be selected if Include Motion is selected.
Motion and Initial Conditions cannot be used together.
If Include Initial Conditions is selected, but Strict Initial Conditions is not selected, then the initial conditions are used only as initial guesses for the initial positions and velocities of the system. RecurDyn can adjust the initial positions and velocities in order to satisfy the constraints.
If Strict Initial Conditions is selected, then the initial position and velocity of this joint are treated as strict constraints that the initial position and velocity must satisfy.
There are restrictions for initial conditions for joints connected to FFlex bodies. For rotational joints (revolute and cylindrical) connected to FFlex bodies that are include in Position and Velocity Pre-Analysis <includeinpositionandvelocitypreanalysis, the initial rotations must be greater than -90 degrees and less than 90 degrees.
Friction
Include Friction: If this option is checked, the user defines the friction of the joint. It must be checked to trigger the friction force.
Force Display: Displays the resultant force vector graphically on Working Window. The displayed force can be defined as shown in Figure 6.140.
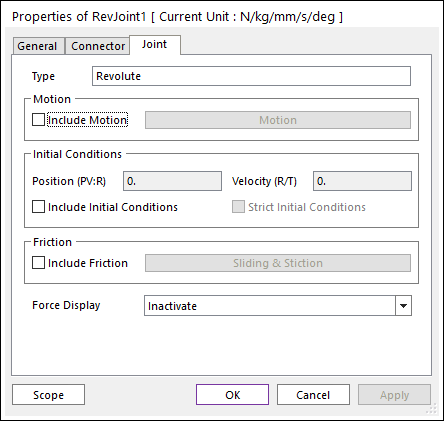
Figure 6.140 Definition of constraint force
Inactive: The force graphical display is inactivated.
Action
PTCV & CVCV: The constrained force and torque that are applied on the action body are displayed at the contact position.
\({{Q}_{a}}=\left\{ \begin{matrix} {{f}_{a}} \\ 0 \\ \end{matrix} \right\}\)
Others: The force and torque which is generalized on the constraint marker of the action body by a constraint force that is displayed at the position. The displayed force can be as the following equation.
\({{Q}_{a}}=\left\{ \begin{matrix} {{f}_{a}} \\ {{\tau }_{a}} \\ \end{matrix} \right\}\)
Base
PTCV, CVCV: The constrained force and torque that are applied on the base body are displayed at the contact position.
\({{Q}_{b}}=\left\{ \begin{matrix} -{{f}_{a}} \\ 0 \\ \end{matrix} \right\}\)
Others: The force and torque which are generalized on the constraint marker of the base body by a constraint force that is displayed at the position. The displayed force can be as the following equation.
\({{Q}_{b}}=\left\{ \begin{matrix} {{f}_{b}} \\ {{\tau }_{b}} \\ \end{matrix} \right\}=\left\{ \begin{matrix} -{{f}_{a}} \\ -{{\tau }_{a}}-{{{\tilde{d}}}_{ba}}{{f}_{a}} \\ \end{matrix} \right\}\)
Both: This simultaneously displays the action and reaction forces at the positions of both constraint markers of each body.