9.3.2.3. Body Page
The Body tab of the Properties dialog box of an FFlex body displays the mass and inertia characteristics of the FFlex body in the reference frame of the body’s center marker.
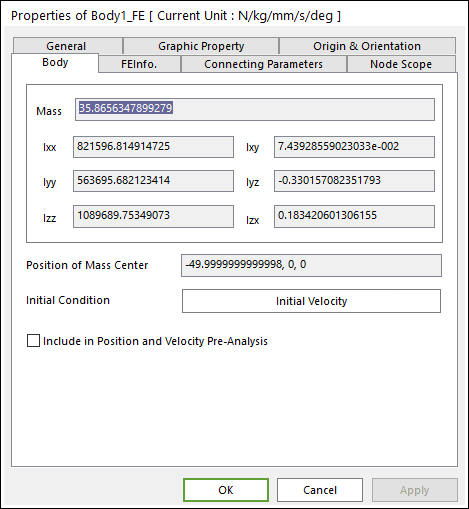
Figure 9.21 Body Tab of the Properties of FFlex Body dialog box
Mass: The mass of the FFlex body.
Ixx, Iyy, Izz, Ixy, Iyz, Izx: The rotational inertia of the body in the reference frame of the body’s center marker in the FFlex body’s initial configuration.
Position of Mass: The location in global space of the center of mass of the FFlex body in its initial configuration.
Initial Velocity: Opens a dialog box that allows for the initial translational and angular velocities of the FFlex body to be specified by the user. The initial velocities are applied to the nodes of the body in the initial configuration. Angular velocities are relative to the body’s center of mass, which is shown in the Position of Mass textbox above. The dialog box is identical to the Body Initial Velocity dialog box shown in Common UI Body.
Include in Position and Velocity Pre-Analysis: If checked, then this FFlex body is included in the position and velocity pre-analysis. Position pre-analysis adjusts the positions of the bodies so that the user-specified initial joint positions, initial body positions, and specified motions at the start time are satisfied. Velocity pre-analysis adjusts the velocities of bodies such that all user-specified initial joint velocities, initial body velocities, and velocities implied by specified motions at the start time are satisfied. If the FFlex body is included in the position and velocity pre-analysis, then it is treated as a rigid body during the pre-analysis. If the FFlex body is not included in the pre-analysis, then its position and velocity is not updated when the solver attempts to satisfy the user-specified initial positions and velocities. Note that the Pre-analysis also determines the independent and redundant constraints. The redundant constraints are ignored by the solver because including them would lead to over-constraint. FFlex bodies are not considered in the determination of redundant constraints, regardless of whether or not they are included in the pre-analysis. If the FFlex body is connected to joints in which the user selects to use user-specified Initial Conditions, it is recommended that the user select Strict Initial Conditions also. If Strict Initial Conditions is not selected, then it is likely that RecurDyn does not closely enforce the user-defined initial conditions connected to FFlex bodies. If the user specifies rotational initial conditions for joints or constraints that support rotation, and if the joint is connected to an FFlex body, then the joint’s initial angular position should be greater than -90 degrees and less than 90 degrees. If Strict Initial Conditions is selected, but RecurDyn still does not enforce the user-defined Initial Conditions, then it is possible that the user must manually set a smaller Redundant Constraints Check Tolerance. In some cases, the automatic value of the Redundant Constraints Check Tolerance is too large for the model, and then RecurDyn ignores the user-specified Initial Conditions.
Note
The mass and rotational inertia are calculated from the FFlex body data. These values cannot be set directly by the user.