6.3.3.6. Gap Force
A Gap Force measures distance between an action marker and base surfaces with defined direction and apply a force with stiffness and damping coefficient. Instead of the action marker, an action surface can be used to apply many forces on each nodes in the action surface.
6.3.3.6.1. Modeling Options
The user can create a force entity as follows.
Surface(PatchSet), Body, Point, Direction, Distance
Surface(PatchSet): Selects a surface or a patch set to define a base solid or FFlex body. The action marker/surface is used to search for the base surface.
Body: Selects an action body of gap force.
Point: Selects a point on an action body. This point defines a location on which the action force is applied.
Direction: Defines a direction of z-axis of the action marker. It is searching direction from action point/points.
Distance: Inputs a distance to limit the range of gap force.
Solid(PatchSet), Body, Point Direction, Distance
Solid(PatchSet): Selects a solid or a patch set to define a base solid or FFlex body. The action marker/surface is used to search for the base surface.
Body: Selects an action body of gap force.
Point: Selects a point on an action body. This point defines a location on which the action force is applied.
Direction: Defines a direction of z-axis of the action marker. It is searching direction from action point/points.
Distance: Inputs a distance to limit the range of gap force.
MultiSurface(PatchSet), Body, Point Direction, Distance
MultiSurface(PatchSet): Selects some surfaces or patch sets to define base solids or FFlex bodies. The action marker/surface is used to search for the base surface.
Body: Selects an action body of gap force.
Point: Selects a point on an action body. This point defines a location on which the action force is applied.
Direction: Defines a direction of z-axis of the action marker. It is searching direction from action point/points.
Distance: Inputs a distance to limit the range of gap force.
MultiSolid(PatchSet), Body, Point Direction, Distance
MultiSolid(PatchSet): Selects some solids or a patch sets to define base solids or FFlex bodies. The action marker/surface is used to search for the base surface.
Body: Selects an action body of gap force.
Point: Selects a point on an action body. This point defines a location on which the action force is applied.
Direction: Defines a direction of z-axis of the action marker. It is searching direction from action point/points.
Distance: Inputs a distance to limit the range of gap force.
6.3.3.6.2. Properties
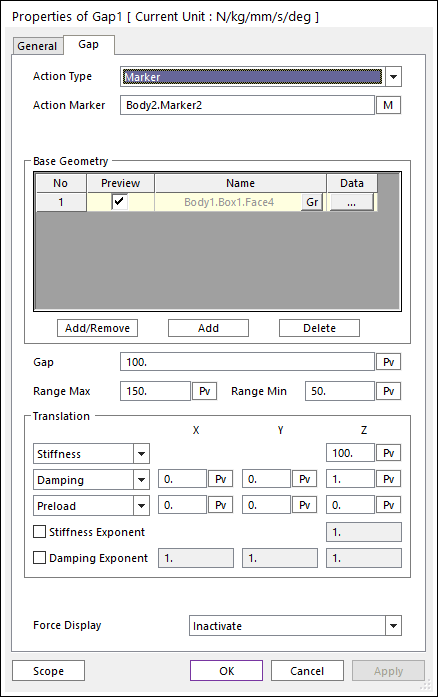
Figure 6.286 Gap Force property page
Action Type: Marker use action marker and action marker’s z direction. Surface use each node on the surface and action marker’s z direction.
Action Marker: Select a marker for the action marker.
Action Surface: Select a surface for the action surface.
Base Geometry: Select multi surfaces for the base surfaces.
Range Max: Defines the maximum range of Gap Force. If the target geometry is met over the range, the result is neglected.
Range Min: Defines the minimum range of Gap Force. If the target geometry is met under the range, the result is neglected. It can be a negative value.
The action force, whic is applied to action point, is calculated according to the following equations:
\({{F}_{x}}'=-{C}_{x}{{\dot{l}_{x}}^{{n}_{x}}}+{P}_{x}'\)
\({{F}_{y}}'=-{C}_{y}{{\dot{l}_{y}}^{{n}_{y}}}+{P}_{y}'\)
\({{F}_{z}}'=-{K}_{z}{{({l}_{z}-{{l}_{0}})}^{{m}_{z}}}-{C}_{z}{{\dot{{l}_{z}}}^{{n}_{z}}}+{P}_{z}'\)
Where, the inputs into the equation are defined in the following table:
Stiffness Coefficient |
\({{K}_{z}}\) |
Enter the coefficient that determines spring force(units are force/length). |
Stiffness Spline |
Fill in values of gap and gap forces that covers the range of extension and retraction of the gap force. |
|
Damping Coefficient |
\({{C}_{x},{C}_{y},{C}_{z}}\) |
Enter the coefficient that determines the damping force given the relative velocity of the gap (units are force-time/length). |
Damping Spline |
Fill in values of gap velocities and damping forces that covers the range of positive and negative velocities in the gap. |
|
Stiffness Exponent |
\({{m}_{z}}\) |
Specify an exponent that is applied to spring force. |
Damping Exponent |
\({{n}_{x},{n}_{y},{n}_{z}}\) |
Specify an exponent that is applied to damping force. |
Gap |
\({{{l}_{0}}}\) |
Enter the gap which is neutral length of the action point and the nearest base surface in action marker’s z direction. |
Current Gap |
\({l}_{z}\) |
The current gap is length of the action point and the nearest base surface in action marker’s z direction. |
Current Gap Velocity |
\(\dot{l}_{x},\dot{l}_{y},\dot{l}_{z}\) |
The current gap velocity is relative velocity of the action point and the nearest base surface. |
Preload |
\({P}_{x}', {P}_{y}', {P}_{z}'\) |
Specify an extra load or force in action marker of the gap force. An expression can be used. |
Force Display: Displays the resultant force vector graphically on Working Window.