6.3.3.3. Plate
A plate force generates a plate force on the three action markers of a base marker.
6.3.3.3.1. Modeling Options
The user can create a force entity as follows.
Point, Point, Point, Point
Point: Selects a point on a base body.
Point: Selects a point on a first action body.
Point: Selects a point on a second action body.
Point: Selects a point on a third action body.
Body, Body, Body, Body, Point, Point, Point, Point
Body: Selects a base body of plate force.
Body: Selects a first action body of plate force.
Body: Selects a second action body of plate force.
Body: Selects a third action body of plate force.
Point: Selects a point on a base body.
Point: Selects a point on a first action body.
Point: Selects a point on a second action body.
Point: Selects a point on a third action body.
6.3.3.3.2. Properties
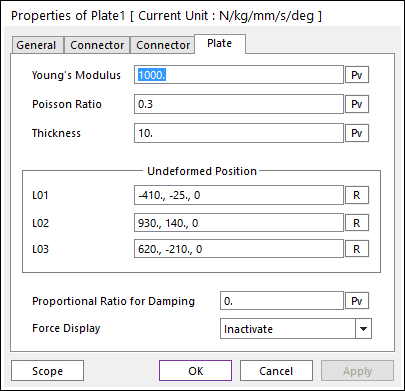
Figure 6.279 Plate property page
Young’s Modulus: Defines the Young’s Modulus of material (Unit: [Force/Length^2]).
Poisson Ratio: Defines the Poisson’s Ratio of material.
Thickness: Defines the thickness of the plate. (Unit: length).
Undeformed Position
L01: Defines the vector of distance between the base marker and the first action marker with respect to the base marker.
L02: Defines the vector of distance between the base marker and the second action marker with respect to the base marker.
L03: Defines the vector of distance between the base marker and the third action marker with respect to the base marker.
Proportional Ratio for Damping: The damping matrix is calculated as \(c=ratio\times K\)
Force Display: Displays the resultant force vector graphically on Working Window.