20.6.5.5. Discrete Zero-Pole
The Discrete Pole/Zero block implements a discrete system with the specified poles, zeros, and gain in terms of the delay operator z.
The system is defined by
\(H(s)=K \frac{\mathbf{Z(z)}}{\mathbf{P(z)}} = K \frac{(z-\mathbf{Z_1})(z-\mathbf{Z_2})...(z-\mathbf{Z_m})}{(z-\mathbf{P_1})(z-\mathbf{P_2})...(z-\mathbf{P_n})}\)
- where,
- \(K\) is the gain\(\mathbf{Z}\) is the zeros vector\(\mathbf{P}\) is the poles vector.
Dialog box
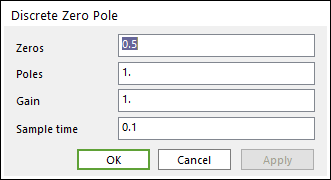
Figure 20.80 Discrete Zero-Pole dialog box
Parameter(s) |
Description |
Zeros |
Enter the matrix of zeros. A matrix with multiple rows can be specified to generate multiple output signals. |
Poles |
Enter the vector of poles. |
Gain |
Enter the gain. |
Sample time |
Enter the time interval between samples. |