6.2.3.1. At Point
An at point joint always corresponds to the origins of two markers. It is the same as the spherical joint. It has three rotational degrees of freedom.
Figure 6.201 Atpoint Joint icon on Working Window
6.2.3.1.1. Modeling Options
The user can create a joint entity as follows.
Point
Point: Selects a point on two bodies to define the location of the atpoint joint.
Body, Body, Point
Body: Selects a base body of the atpoint joint.
Body: Selects an action body of the atpoint joint.
Point: Selects a point to define the location of the atpoint joint.
6.2.3.1.2. Properties
The user can only define the force display using the Joint page.
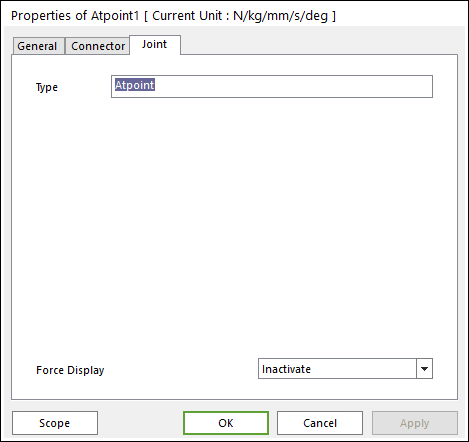
Figure 6.202 At Point property page [Joint page]
Type: Shows the type of joint.
Force Display: Displays the resultant force vector graphically on Working Window.