6.2.2.5. Planar
A plane joint allows sliding or rotating movements on the specified plane. It constraints the xy plane of the action marker in the same plane as the xy plane of the base marker. The location of the planar joint decides a point in space through which the joint’s plane of motion passes. The orientation vector of the planar joint is perpendicular to the joint’s plane of motion. The rotational axis of the planar joint, which is normal to the joint’s plane of motion, is parallel to the orientation vector. This joint has one rotational and two translational degrees of freedom. The z-axis of this joint is parallel to the plane normal.
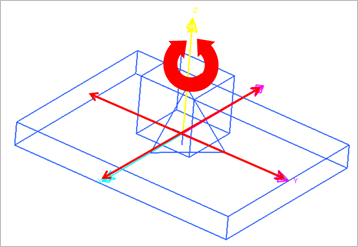
Figure 6.172 Planar Joint icon on Working Window
6.2.2.5.1. Modeling Options
The user can create a joint entity as follows.
Point, Direction
Point: Selects a point on two bodies to define the location of the planer joint.
Direction: Defines the direction of z-axes of base and action markers as the axis of rotation.
Body, Body, Point, Direction
Body: Selects a base body of the planer joint.
Body: Selects an action body of the planer joint.
Point: Selects a point to define the location of the planer joint.
Direction: Defines the direction of z-axes of base and action markers as the axis of rotation.
6.2.2.5.2. Properties
The user can only define the force display using the Joint page.
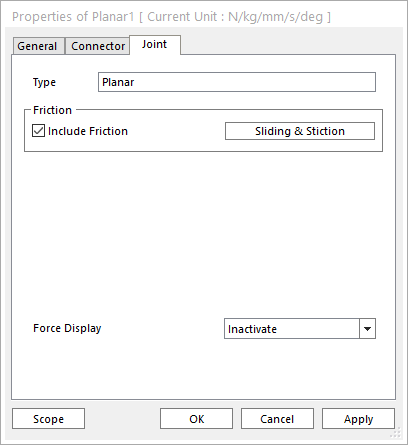
Figure 6.173 Planar property page [Joint page]
Type: Shows the type of joint.
Force Display: Displays the resultant force vector graphically on Working Window.
6.2.2.5.2.1. Joint Friction
This defines the friction force which contains stiction algorithm on the planar joint. Include Friction option in Joint property page must be checked and Sliding and Stiction is selected to use the friction force.
Figure 6.174 Planar Joint property page [Sliding & Stiction type]
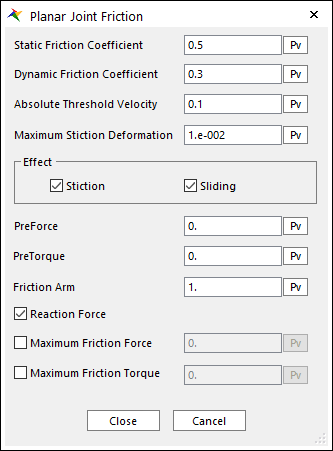
Figure 6.175 Planar Joint Friction dialog box
The frictional torque is calculated according to the following equation:
\({{F}_{friction}}=\mu ({{F}_{reaction}}+(1/{{\mu }_{s}}){{F}_{preForce}})\)
\({{T}_{friction}}=\mu ({{R}_{arm}}{{F}_{reaction}}+({{R}_{arm}}/{{\mu }_{s}}){{F}_{preForce}}+(1/{{\mu }_{s}}){{T}_{preTorque}})\)
Where, the inputs into the equation are defined in the following table:
CurrentFrictionCoefficient |
\(\mu\) |
The coefficient of friction calculated during the simulation is a function of the relative velocity between body surfaces. |
StaticFrictionCoefficient |
\({{\mu }_{s}}\) |
The coefficient of friction is zero at a zero velocity, but it smoothly transitions to the static coefficient of friction at Absolute Threshold Velocity (\(\Delta v\)). |
Effect |
Checks Stiction or Sliding
\({{\mu }^{sliding\text{ }only}}=-{{\mu }_{v}},\text{ }{{\mu }_{v}}^{\max }={{\mu }_{d}}\)
\({{\mu }^{stiction\text{ }only}}=-\left( 1-\beta \right){{\mu }_{\delta }}-{{\mu }_{v}},\text{ }{{\mu }_{v}}^{\max }={{\mu }_{s}}\)
For more information, click here.
|
|
Pre Force |
\({{F}_{preload}}\) |
A constant frictional force that acts during the entire simulation. |
Reaction Force |
\({{F}_{reaction}}\) |
The force in the joint calculated during the simulation in the direction normal to the translational axis or XY plane. |
Pre Torque |
\({{T}_{preload}}\) |
A constant frictional torque that acts during the entire simulation. |
Friction Arm |
\({{R}_{arm}}\) |
The average distance or radius from the translational axis or XY plane. |
Maximum Friction Force |
\({{F}_{\max }}\) |
Collisions during contact as well as transitions during sliding forces can result in force spikes. High frictional forces can result from these spikes. This option allows a maximum friction force to be defined that should correspond to the maximum expected steady-state force. |
Maximum Friction Torque |
\({{T}_{\max }}\) |
Collisions during contact as well as transitions during sliding forces can result in force spikes. High frictional torques can result from these spikes. This option allows a maximum friction torque to be defined that should correspond to the maximum expected steady-state force. |
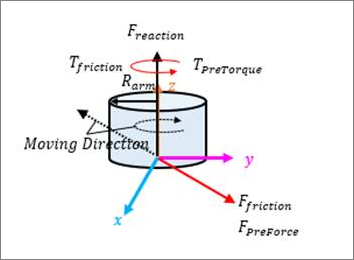
As a result of planar joint friction, FX_Friction_Force, FY_Friction_Force, and TZ_Friction_Torque are shown. The reference frame that defines the axis of the result values is the base marker of the joint, not the inertia reference frame (Ground.InertiaMarker).
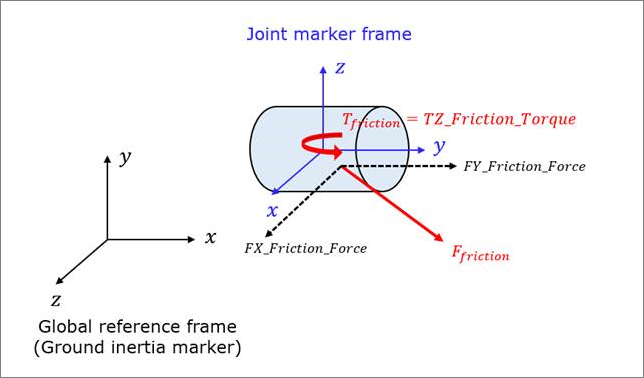
Figure 6.176 Reference frame that defines the axis of the result of planar joint