10.13.2. Output Format
Global inertial part
It contains selected body velocity, acceleration and applied gravitational acceleration.
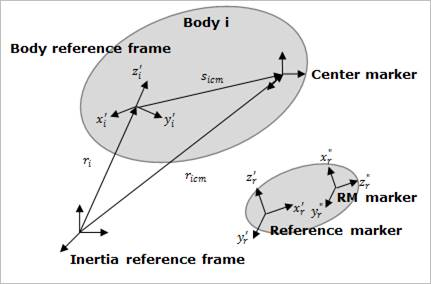
Figure 10.120 Body inertia
VEL_RX, VEL_RY, VEL_RZ: The x, y and z components of the angular velocity of center marker in the user defined reference frame.
\(\mathbf{w}_i=\mathbf{A}_i\mathbf{w}_i^{'}\)
\(\mathbf{w}=(\mathbf{A}_r\mathbf{C}_r)^T\mathbf{w}_i\)
ACC_X, ACC_Y, ACC_Z: The x, y, and z components of the Translational acceleration of center marker in the user defined reference frame
\(\ddot{\mathbf{r}}_{icm}=\mathbf{A}_i\ddot{\mathbf{r}}_i^{'}+\mathbf{A}_i\tilde{\mathbf{w}}_i^{'}\dot{\mathbf{r}}_i^{'} +\mathbf{A}_i\tilde{\mathbf{w}}_i^{'}\tilde{\mathbf{w}}_i^{'}\mathbf{s}_{icm}^{'}+\mathbf{A}_i\tilde{\dot{\mathbf{w}}}_i^{'}\mathbf{s}_{icm}^{'}\)
\(\ddot{\mathbf{r}}=(\mathbf{A}_r\mathbf{C}_r)^T\ddot{\mathbf{r}}_{icm}\)
ACC_RX, ACC_RY, ACC_RZ: The x, y, and z components of the Rotational acceleration of center marker in the user defined reference frame
\(\dot{\mathbf{w}}_i=\mathbf{A}_i\dot{\mathbf{w}}_i^{'}\)
\(\dot{\mathbf{w}}=(\mathbf{A}_r\mathbf{C}_r)^T\dot{\mathbf{w}}_i\)
GRAVITY: The x, y, and z components of gravity in the user defined reference frame
\({\mathbf{G}}=(\mathbf{A}_r\mathbf{C}_r)^T{\mathbf{G}}_i\)