4.12. General Constraint
A General Constraint can constraint the degree of freedom (DOF) of a rigid body by using expression. It can be user-defined joint or motion.
Caution
Position level expressions are recommended. Velocity and Acceleration (Force, Contact) level expressions are not supported.
A General Constraint can use only Rigid Body. DOF of FFlex body and RFlex body can not constraint.
There are no output data (reaction force) in the rplt.
At least one or more dependent body are required in expression.
Variable Equation is not dependent body, even though it has many dependent bodies.
- Work Case
- Alpha = DZ(1,2)General constraint expression = VARVAL(Alpha) - DZ(3,4)
- Not work Case
- Alpha = DZ(1,2) - DZ(3,4)General constraint expression = VARVAL(Alpha)
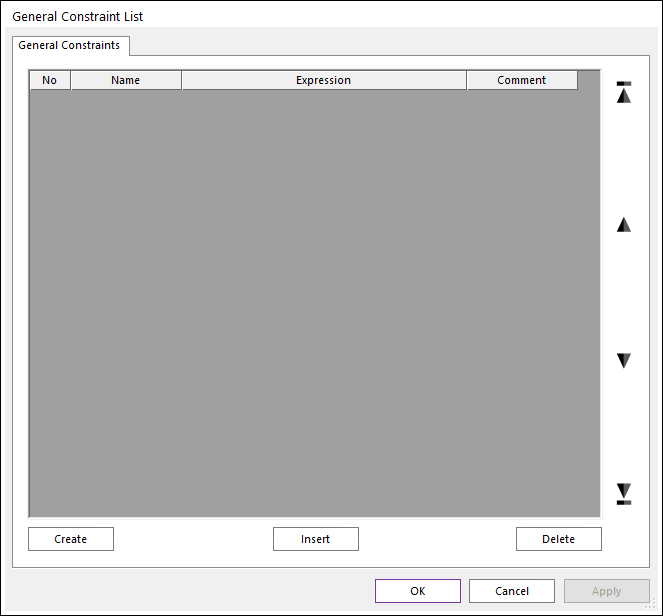
Figure 4.152 General Constraint List dialog box
No: Shows the number of equations.
Name: Shows the name of the equation.
Expression: Shows the defined equation.
Comment: Shows the comment of the General Constraint.
Create: Creates a General Constraint.
Insert: Inserts a General Constraint at the current cursor row.
Delete: Deletes a General Constraint at the current cursor row.
Create or Insert as shown in Figure 4.152 and specify Name as shown in Figure 4.152.
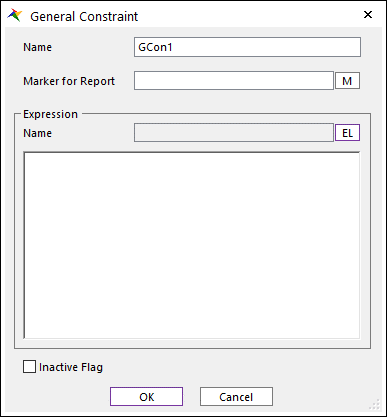
Figure 4.153 General Constraint dialog box
Name: Specifies the name of general constraint.
Marker for Report: Specifies Marker for Report. If a marker related to the expression used in the constraint is selected, the reaction force calculated from the marker is written in the RPLT. If an unrelated marker is selected, the value wrote in the RPLT is 0.
EL: Accesses the Expression List dialog box.
Inactive Flag: If you check this option, this general constraint becomes inactive.