25.6.3. Circular Guide
A circular guide is dependent on a guide part. If this guide is created, a circular guide to sheet contact is automatically created. This and roller are the same contact geometry. The contact normal direction is obtained by the relative vector from the guide center to a sheet body and the tangent direction is determined with the specified depth direction by the right hand rule. The plus direction of Guide velocity is defined as the plus tangential direction.
25.6.3.1. Modeling Options
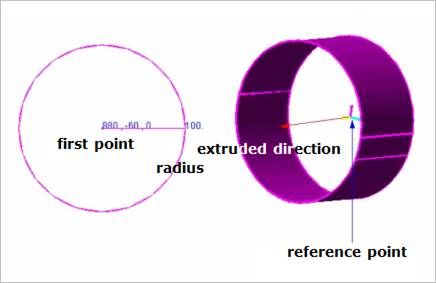
Figure 25.58 Circular Extrusion Guide
Guide, OrthoDirection, Radius
Guide: Selects a linear guide to define the position of the circle guide.
OrthoDirection: Defines an orthotropic direction for the linear guide or the arc guide.
Radius: Defines a radius of the circle guide.
Line, OtrhoDirection, Radius
Line: Selects an edge of the linear guide or the arc guide.
OrthoDirection: Defines an orthotropic direction for the linear guide.
Radius: Defines a radius of the circle guide.
Point, Radius
Point: Selects a point to define the center of the circle guide.
Radius: Defines a radius of the circle guide.
Point, Radius, Depth
Point: Selects a point to define the center of the circle guide.
Radius: Defines a radius of the circle guide.
Depth: Defines a depth of the circle guide.
Point, Radius, Direction, Depth
Point: Selects a point to define the center of the circle guide.
Radius: Defines a radius of the circle guide.
Direction: Defines a depth direction of the circle guide.
Depth: Defines a depth of the circle guide.
GuideMotherBody, Point, Radius
GuideMotherBody: Selects a body to define the parent body of the circle guide.
Point: Selects a point to define the center of the circle guide.
Radius: Defines a radius of the circle guide.
GuideMotherBody, Point, Radius, Depth
GuideMotherBody: Selects a body to define the parent body of the circle guide.
Point: Selects a point to define the center of the circle guide.
Radius: Defines a radius of the circle guide.
Depth: Defines a depth of the circle guide.
GuideMotherBody, Point, Radius, Direction, Depth
GuideMotherBody: Selects a body to define the parent body of the circle guide.
Point: Selects a point to define the center of the circle guide.
Radius: Defines a radius of the circle guide.
Direction: Defines a depth direction of the circle guide.
Depth: Defines a depth of the circle guide.
25.6.3.2. Properties
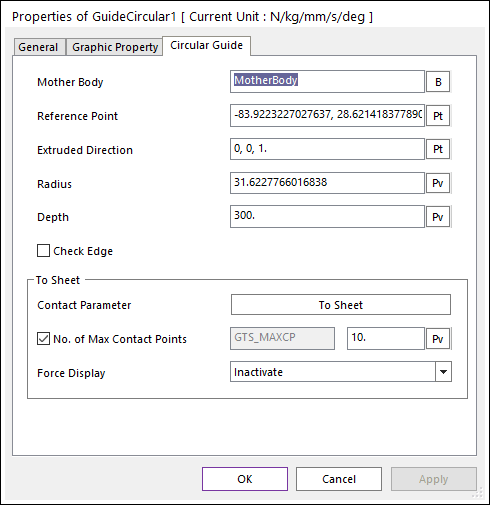
Figure 25.59 Guide Circular property page [Circular Guide page]
Mother Body: Defines the name of the guide body including the guide.
Reference Position: Defines the position of reference marker of the extruded circle geometry.
Extruded Direction: Defines the z-axis of reference marker of the extruded line geometry.
Radius: Defines the radius of the extruded line geometry.
Depth: Defines the depth of the extruded line geometry.
Check Edge: When the guide radius is smaller than the lengths of a contacted shell element, the contact it not worked. In this case, if this option is on, the two end sides of the guide are checked in the sheet-to-guide contact. The contact geometry of the guide is represented as two spheres.
Contact Parameter: Allows the user to modify contact parameters by clicking To Sheet. In this dialog box, the user can modify the contact parameters of contact forces applied between the sheet and the guide. Refer to Contact Formulations for MTT3D.
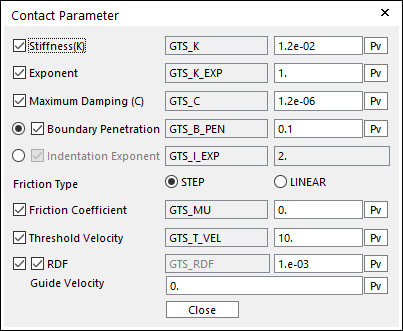
Figure 25.60 Contact Parameter dialog box
No. of Max Contact Points: Defines the number of max contact point for output. User can define this value from 1 to 5000. This value only affects Force Display and RPLT data about the contact points. The default value is 10.
Force Display: Graphically displays the all contact force vectors (the sum of the normal and tangential contact force) at each contact point up to the No. of Max Contact Point.