22.3. Sample for Co-Simulation
A simple example is given in this section. The model is shown in Figure 22.20.
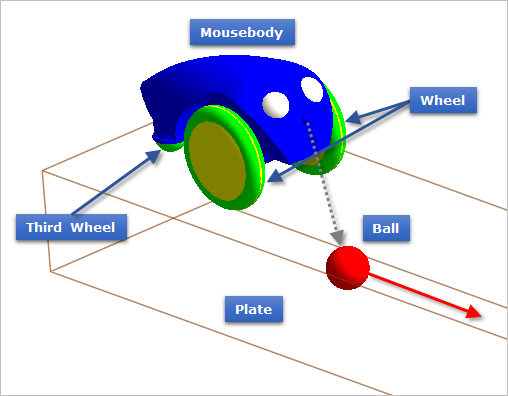
Figure 22.20 Mouse model
The objective of the model is to develop a mouse that follows a moving ball in a given distance.
Revolute Joint: The two large wheels are attached to Mousebody with one Revolute Joint.
Fixed Joint: Desk is locked to ground with a Fixed Joint
Spherical Joint: The small wheel is attached to Mousebody with a Spherical Joint
Translation Joint: The Ball moves along the desk as constrained with the Translational Joint.
Contact: All three wheels interact with the desk using Contact Forces.
Force: A single rotational axial force is applied to the wheel Revolute Joint to move the mouse.