20.6.13.2. DC Drive
DC Drive block is the block to model DC Machine and Controller to control DC Machine. Refer to DC.
Dialog box
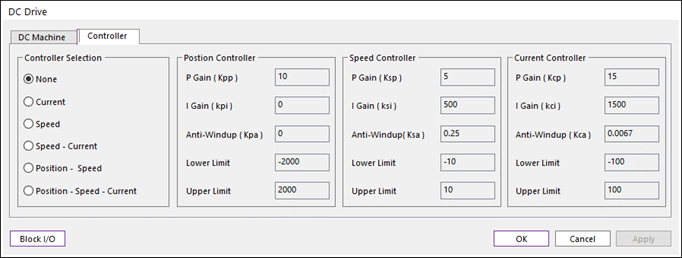
Figure 20.190 DC Drive dialog box
Parameter(s) |
Description |
Kcp |
Proportional gain of DC Current Controller. |
Kci |
Integral gain of DC Current Controller. |
Kca |
Anti-Windup gain of DC Current Controller. |
Lower Limit |
Output minimum value (Voltage) of DC Current Controller. |
Upper Limit |
Output maximum value (Voltage) of DC Current Controller. |
Parameter(s) |
Description |
Ksp |
Proportional gain of DC Speed Controller. |
Ksi |
Integral gain of DC Speed Controller. |
Ksa |
Anti-Windup gain of DC Speed Controller. |
Lower Limit |
Output minimum value (Current) of DC Speed Controller. |
Upper Limit |
Output maximum value (Current) of DC Speed Controller. |
Parameter(s) |
Description |
Kpp |
Proportional gain of DC Position Controller. |
Kpi |
Integral gain of DC Position Controller. |
Kpa |
Anti-Windup gain of DC Position Controller. |
Lower Limit |
Output minimum value (Speed) of DC Position Controller. |
Upper Limit |
Output maximum value (Speed) of DC Position Controller. |
20.6.13.2.1. Input Port and Output Port of DC Drive
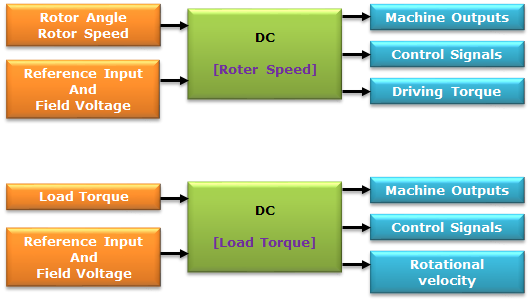
Input signals
Table 20.127 1st Port Input data Mode
Input signal of 1st Port
Rotor Speed
Rotor Angle, Rotor Speed
Load Torque
Load Torque
Table 20.128 2nd Port Controller Mode
Input signal of 2nd Port
None
Armature Voltage, Field Voltage
Current
Current Reference, Field Voltage
Speed
Speed Reference, Field Voltage
Speed + Current
Speed Reference, Field Voltage
Position + Speed
Position Reference, Field Voltage
Position + Speed + Current
Position Reference, Field Voltage
Output signals
Table 20.129 1st Port No
Signal
Description
Unit
1
\(\theta\)
Is the rotor angle
rad
2
\(\omega\)
Is the rotor angular speed
rad/s
3
\({{I}_{a}}\)
Is the armature current
A
4
\({{I}_{f}}\)
Is the field current
A
5
\({{T}_{e}}\)
Is the generated electrical torque
N.m
Table 20.130 2nd Port ControllerMode
Output signals of 2nd Port
None
None
Current
Armature Voltage
Speed
Armature Voltage
Speed + Current
Reference Current, Armature Voltage
Position + Speed
Reference Speed, Armature Voltage
Position + Speed + Current
Reference Speed, Reference Current, Armature Voltage
Table 20.131 3rd Port Input dataMode
Output signal of 3rd Port
Rotor Speed
Driving Torque
Load Torque
Rotor Rotational Velocity
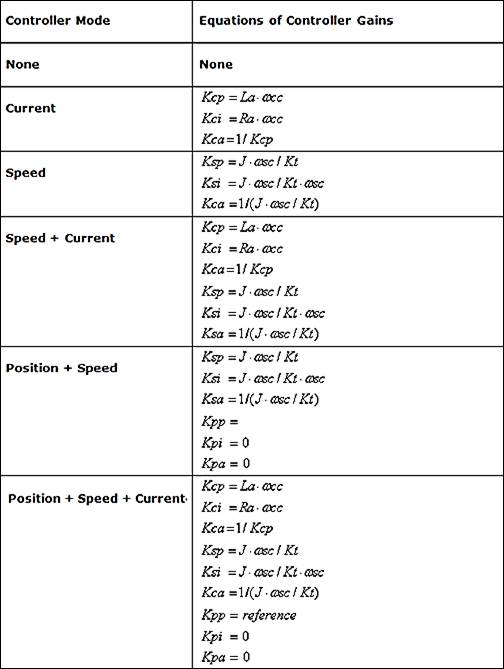
20.6.13.2.2. DC Controller
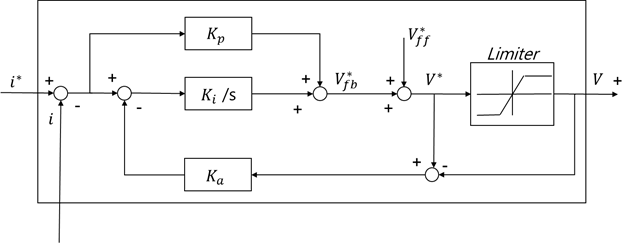
Figure 20.191 Current Controller
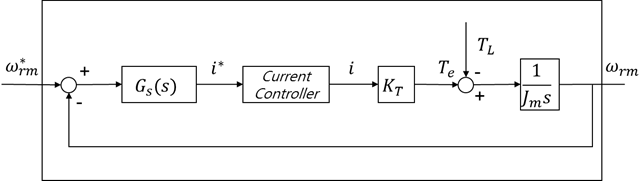
Figure 20.192 Speed + Current Controller
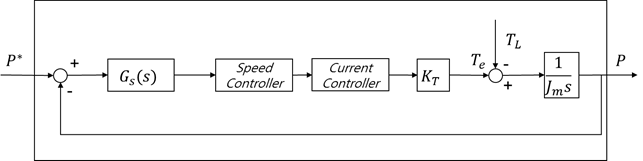
Figure 20.193 Position Controller
20.6.13.2.3. Design of Controller