26.1.1. Contact Parameter
Contact Parameter: Defines contact properties between the circle roller and workpiece.
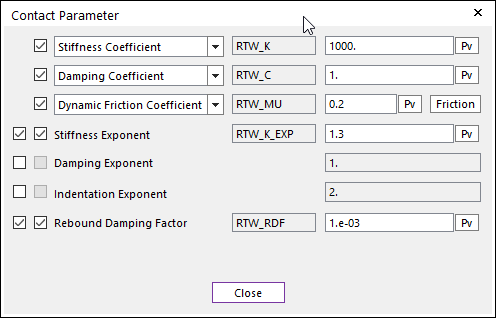
Figure 26.2 Contact Parameter dialog box
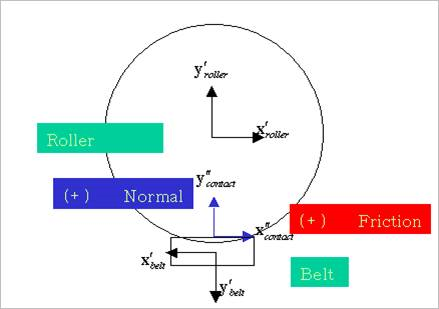
Figure 26.3 Contact Normal force and Friction force
The contact normal force is calculated according to the following equation:
\({{F}_{n}}=K{{\delta }^{m1}}+C\frac{{\dot{\delta }}}{\left| {\dot{\delta }} \right|}{{\left| {\dot{\delta }} \right|}^{m2}}{{\delta }^{m3}}\)
Where, the inputs into the equation are defined in the following table:
Stiffness Coefficient |
\(K\) |
Enter the coefficient that determines spring stiffness, namely the change in the spring force given a change in penetration
(units are force/length).
|
Stiffness Spline |
Fill in values of penetration and spring forces that covers the range of extension and retraction of penetration.
For more information, click here.
|
|
Damping Coefficient |
\(C\) |
Enter the coefficient that determines the damping force given the relative velocity of penetration
(units are force-time/length).
|
Damping Spline |
Fill in values of penetration velocities and damping forces that covers the range of positive and negative velocities in penetration.
For more information, click here.
|
|
Stiffness Exponent |
\(m1\) |
Specify an exponent that is applied to the change in penetration. |
Damping Exponent |
\(m2\) |
Specify an exponent that is applied to the rate of change of penetration (penetration velocity). |
Indentation Exponent |
\(m3\) |
Specify an exponent for an indentation damping effect.
When the penetration is very small, the contact normal force is negative due to a negative damping force, which is not realistic.
This situation is overcome by using the indentation exponent greater than one.
|
Penetration |
\(\delta\) |
The friction force is calculated according to the following equation:
\({{f}_{f}}=\mu (v)\cdot \left| {{f}_{n}} \right|\)
\(\mu(v)=step5(v,-{{v}_{s}},-{{\mu }_{s}},{{v}_{s}},{{\mu }_{s}})\cdot sign(-v) \left| v \right|<{{v}_{s}}\)
\(\mu(v)=step5(v,{{v}_{s}},{{\mu }_{s}},{{v}_{d}},{{\mu }_{d}})\cdot sign(-v) \left| v \right| \geq {{v}_{s}}\)
\({{f}_{f}}=Min({{f}_{f}},{{f}_{\max }})\)
Where, the inputs into the equation are defined in the following table:
Friction Coefficient |
\({{\mu }_{s}}\) |
The coefficient of friction is zero at a zero velocity,
but it smoothly transitions to the static coefficient of friction at Static Threshold Velocity.
|
Static Threshold Velocity |
\({{v}_{s}}\) |
Defines the sliding velocity at which the coefficient of friction is set to the Static Friction Coefficient. |
Dynamic Friction Coefficient |
\({{\mu }_{d}}\) |
The coefficient of friction smoothly transitions to Dynamic Friction Coefficient
as the sliding velocity exceeds the Dynamic Threshold Velocity.
|
Dynamic Threshold Velocity |
\({{w}_{t}}\) |
The transition to Dynamic Friction Coefficient is complete when the sliding velocity Dynamic Threshold Velocity. |
Maximum Friction Force |
\({{f}_{\max }}\) |
Collisions during contact as well as transitions during sliding forces can result in force spikes.
High frictional forces can result from these spikes.
This option allows a maximum friction force to be defined
that should correspond to the maximum expected steady-state force.
|
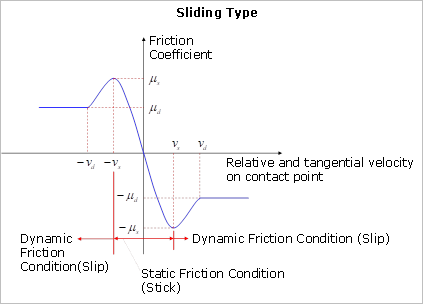
Figure 26.4 Friction force
RDF (Rebound Damping Factor) controls the rebound damping force when bodies are on restitution phase. Default is checked, and the value is 0.001. To see about the RDF in detail, click here.
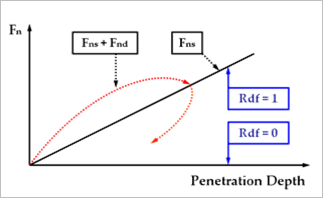
Figure 26.5 Effect of the RDF (Rebound Damping Factor)