31.3.4. Gear Dog
Gear Dog Contact generates a force between convex and concave Gear Dog geometries.
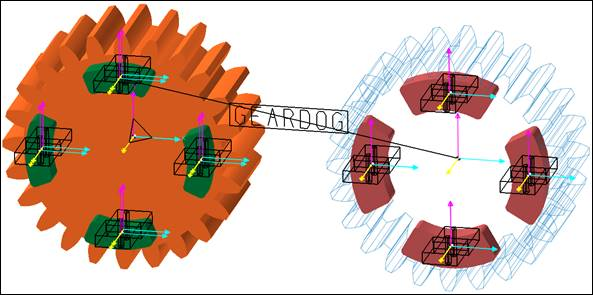
Figure 31.110 Gear Dog Contact
31.3.4.1. Modeling Options
The user can define a 3D Contact R as follows.
Body(Group), Body(Group)
Body(Group): Selects a GearDog with Convex.
Body(Group): Selects a GearDog with Concave.
Group or Body with Convex, Group or Body with Convex
Note
When Gear Dog with Concave is selected, the geometry that defined in Gear Dog with Convex is automatically created.
31.3.4.2. Properties
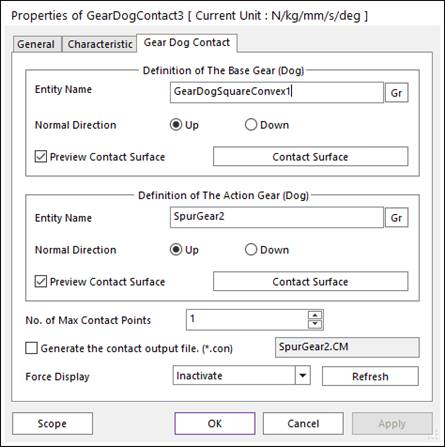
Figure 31.111 Gear Dog Contact property page
This contact is same to Solid Contact supported as a Contact entity.