7.4.4. Force
The lists of Force include the result set about all forces except for a tire force.
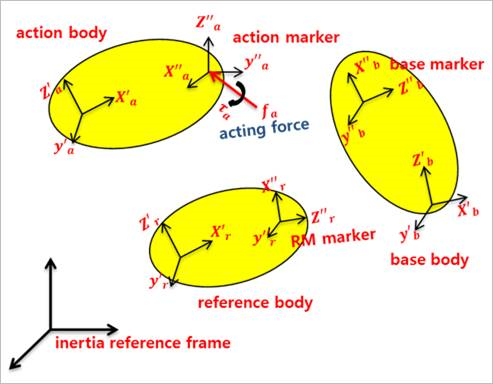
Figure 7.91 Definition of force plot data
FM_ForceType: The magnitude of the translational force acting at the action marker.
FX_ForceType, FY_ForceType, FZ_ForceType:
Translational, Rotational and Screw forces: The x, y, and z components of the translational force acting at the action marker in the reference frame of the RM marker.
\(^r\mathbf{f}''=(\mathbf{A}_r\mathbf{C}_r)^T\mathbf{f}_a\)
The other forces: The x, y, and z components of the translational force acting at the action marker in the reference frame of base marker.
\(^b\mathbf{f}''=(\mathbf{A}_b\mathbf{C}_b)^T\mathbf{f}_a\)
TM_ForceType: The magnitude of the torque acting at the action marker.
TX_ForceType, TY_ForceType, TZ_ForceType:
Translational, Rotational and Screw forces: The x, y, and z components of the torque acting at the action marker in the reference frame of the RM marker.
\(^r\mathbf{\tau}_a''=(\mathbf{A}_r\mathbf{C}_r)^T\mathbf{\tau}_a\)
The other forces: The x, y, and z components of the torque acting at the action marker in the reference frame of base marker.
\(^b\mathbf{\tau}_a''=(\mathbf{A}_b\mathbf{C}_b)^T\mathbf{\tau}_a\)
DEFL_TSDA: The difference of the original length and a distance between the base marker and the action marker can be computed as following equation:
\(\Delta{l}=\text{DM}(i,j)-l_0\)
DEFRZ_RSDA: The difference of original angle and a relative angle between the base marker and the action marker can be computed as following equation:
\(\Delta\theta=\text{YAW}(i,j)-\theta_0\)