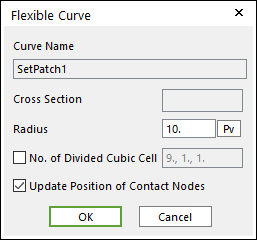
Cross Section: The cross section of beam patch set. The cross section is a circle.
Radius: The radius of circle. The radius of cylinder and sphere of the contact geometry is determined by this value.
No. of Divided Cubic Cell: The number of cubic cells dividing a contact boundary box. This value is automatically calculated. But if need be, the value can be modified by user.
Update Position of Contact Nodes: A flag whether the position of nodes belong to the patch set is updated during a simulation. If your system is the small deformation problem and this option is off, the solving time can be improved.
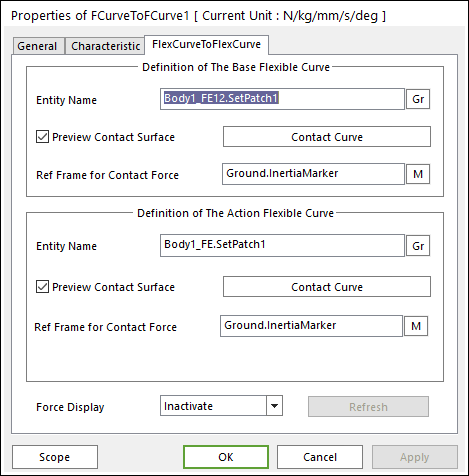
Ref. Frame for Contact Surface: The contact force applied on the action body is reported as a force generalized on the defined marker.
If the marker is not defined, the default is Ground.Inertia Marker.
Force Display: Graphically displays the resultant force vector on the view window.
Refresh: When the action or base contact patch set is changed, you can refresh the preview of information of specified contact patch set as using this function.