6.4.3.5. Sphere To Cone
A Sphere To Cone Contact generates a force between a sphere and a cone.
The sphere and cone must belong to two different bodies.
The sphere must be defined an action geometry and the cone must be defined a base geometry.
The sphere must be out of the cone.
The contact force can be not only linear or exponential but also nonlinear spline characteristics to the contact penetration and its velocity
6.4.3.5.1. Modeling Options
In the case of Sphere To Cone contact, a sphere geometry type is supported for an action geometry and a cone geometry type is supported for a base geometry when creating.
Cone, Sphere
Cone: Selects a cone to define a base cone.
Sphere: Selects a sphere to define an action sphere.
Cone, MultiSphere
Cone: Selects a cone to define a base cone.
MultiSphere: Selects some spheres to define action spheres.
Cone, Sphere, Cone, Sphere
Cone: Selects a cone to define a base cone.
Sphere: Selects a sphere to define an action sphere.
Cone: Selects a cone to define another base cone.
Sphere: Selects a sphere to define another action sphere.
MultiCone, MultiSphere
MultiCone: Selects some cones to define base cones.
MultiSphere: Selects some spheres to define action spheres.
6.4.3.5.2. Properties
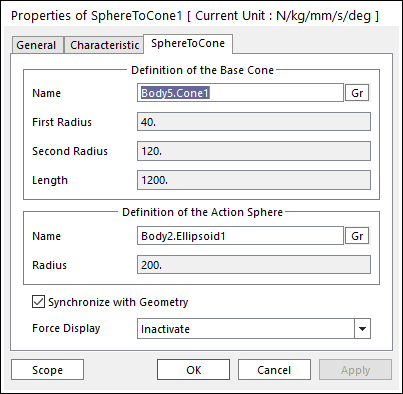
Figure 6.359 Properties of SphereToCone dialog box
Definition of The Base Cone
Entity Name: Defines the name of base cone. The base cone can be dispatched from the Working Window by clicking Gr.
First Radius: Shows the first radius of base cone.
Second Radius: Shows the second radius of base cone.
Length: Shows the length of base cylinder.
Definition of The Action Sphere
Entity Name: Defines the name of action sphere. The action sphere can be dispatched from the Working Window by clicking Gr.
Radius: Shows the radius of an action sphere.
Synchronize with Geometry
If this option is checked, First Radius, Second Radius, Length and Radius in contact properties are automatically defined with that of the specified graphic. (The default is checked.)
If this option is not checked, the user can modify the contact properties.
Force Display: Graphically displays the resultant force vector on the view window.