6.3.2.5. Rotational Axial
A rotational axial force is similar to a rotational spring because it produces a torque between two bodies at a point and about a rotational axis. However, a Rotational Axial Force uses a function expression to control the magnitude of the force rather than coefficients or a spline curve.
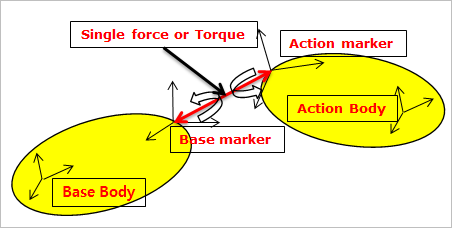
Figure 6.259 Axial Force and Rotational Axial Force
6.3.2.5.1. Modeling Options
The user can create a force entity as follows.
Joint
Joint: Selects a revolute joint.
Point, Direction
Point: Selects a point on two bodies to define the location of rotational axial force.
Direction: Defines the direction of z-axis of rotational axial force.
Body, Body, Point, Direction
Body: Selects a base body of rotational axial force.
Body: Selects an action body of rotational axial force.
Point: Selects a point on two bodies to define the location of rotational axial force.
Direction: Defines the direction of z-axis of rotational axial force.
6.3.2.5.2. Properties
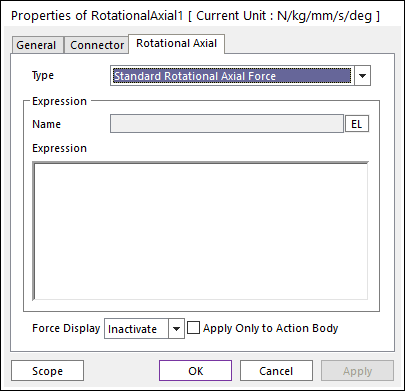
Figure 6.260 Rotational Axial property page
Type: Select a type of expression as Standard Rotational Axial Force or User Subroutine Rotational Axial Force.
Standard Rotational Axial Force: Defines by using the function expression.
User Subroutine Rotational Axial Force: Defines by using the user subroutine. In case of Rotational Axial Force, the format to define USUB is same to Axial Force. For more information, click Axial Force USUB.
Expression: Creating an expression of a force. If the user defines the expression, the substance of expression is shown in the text box.
Force Display: Displays the resultant force vector graphically on Working Window.
Apply Only to Action Body: This option is only available in the Axial Force and Rotational Axial Force. If this option is checked, the user-defined force is only applied on the action body and its direction is same as the z-axis of base force marker.