5.15.4. Point to Point
The user can easily check for the proper displacement, velocity or acceleration between any two markers. It is a convenient method to calculate the relationship between two markers without using the request function.
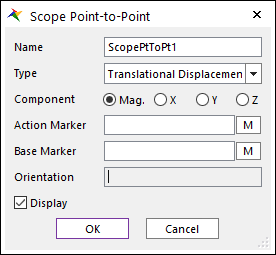
Figure 5.120 Point to Point of Scope
Name: Define the scope name.
Type: Select the type to be calculated between two markers.
Component: Select a component type.
Action Marker: Select a marker for the action marker.
Base Marker: Select a marker for the base marker.
Reference Frame: Select a marker for the reference frame. This edit box is activated for each component type.
Display: Display the scope.
Translational Displacement
The translational displacement between two markers is defined by following equation.
\(\begin{aligned} & {{d}_{ba}}={{r}_{a}}+{{s}_{a}}-{{r}_{b}}-{{s}_{b}} \\ & ={{r}_{a}}+{{A}_{a}}{{{{s}'}}_{a}}-{{r}_{b}}-{{A}_{b}}{{{{s}'}}_{b}} \end{aligned}\)
If the RM marker is defined, the relative displacement is computed as follows.
\({}^{r}{{{d}''}_{ba}}={{({{A}_{r}}{{C}_{r}})}^{T}}{{d}_{ba}}\)
The distance between two markers is the magnitude of the relative displacement vector.
\(d=\left| {{d}_{ba}} \right|\)
Rotational Displacement
The rotational displacement between two markers is the 1-2-3 Euler Angle of the action marker as measured from the base marker.
\({{({{A}_{b}}{{C}_{b}})}^{T}}{{A}_{a}}{{C}_{a}}={{R}_{z}}(\gamma ){{R}_{y}}(\beta ){{R}_{x}}(\alpha )\)
Translational Velocity
The translational velocity between two markers is defined by the following equation.
\(\begin{aligned} & {{{\dot{d}}}_{ba}}={{{\dot{r}}}_{a}}+{{{\dot{s}}}_{a}}-{{{\dot{r}}}_{b}}-{{{\dot{s}}}_{b}} \\ & ={{A}_{a}}{{{{\dot{r}}'}}_{a}}+{{A}_{a}}{{{{\tilde{\omega }}'}}_{a}}{{{{s}'}}_{a}}-{{A}_{b}}{{{{\dot{r}}'}}_{b}}-{{A}_{b}}{{{{\tilde{\omega }}'}}_{b}}{{{{s}'}}_{b}} \end{aligned}\)
\({}^{r}{{{d}''}_{ba}}={{({{A}_{r}}{{C}_{r}})}^{T}}{{\dot{d}}_{ba}}\)
Rotational Velocity
The rotational velocity between two markers is defined by the following equation.
\(\begin{aligned} & {{\omega }_{ba}}={{\omega }_{b}}-{{\omega }_{a}} \\ & ={{A}_{a}}{{{{\omega }'}}_{a}}-{{A}_{b}}{{{{\omega }'}}_{b}} \end{aligned}\)
Translational Acceleration
The translational acceleration between two markers is defined by the following equation.
\(\begin{aligned} & {{{\ddot{d}}}_{ba}}={{{\ddot{r}}}_{a}}+{{{\ddot{s}}}_{a}}-{{{\ddot{r}}}_{b}}-{{{\ddot{s}}}_{b}} \\ & ={{A}_{a}}{{{{\ddot{r}}'}}_{a}}+{{A}_{a}}{{{{\tilde{\omega }}'}}_{a}}{{{{\dot{r}}'}}_{a}}+{{A}_{a}}{{{{\tilde{\omega }}'}}_{a}}{{{{\tilde{\omega }}'}}_{a}}{{{{s}'}}_{a}}+{{A}_{a}}{{{{\tilde{\dot{\omega }}}'}}_{a}}{{{{s}'}}_{a}} \\ & -{{A}_{b}}{{{{\ddot{r}}'}}_{b}}-{{A}_{b}}{{{{\tilde{\omega }}'}}_{b}}{{{{\dot{r}}'}}_{b}}+{{A}_{b}}{{{{\tilde{\omega }}'}}_{b}}{{{{\tilde{\omega }}'}}_{b}}{{{{s}'}}_{b}}+{{A}_{b}}{{{{\tilde{\dot{\omega }}}'}}_{b}}{{{{s}'}}_{b}} \end{aligned}\)
\({}^{r}{{{\ddot{d}}''}_{ba}}={{({{A}_{r}}{{C}_{r}})}^{T}}{{\ddot{d}}_{ba}}\)
Rotational Acceleration
The rotational acceleration between two markers is defined by following equation.
\(\begin{aligned} & {{{\dot{\omega }}}_{ba}}={{{\dot{\omega }}}_{b}}-{{{\dot{\omega }}}_{a}} \\ & ={{A}_{a}}{{{{\dot{\omega }}'}}_{a}}-{{A}_{b}}{{{{\dot{\omega }}'}}_{b}} \end{aligned}\)
Step to Create a Point-To-Point Scope
Click Point-to-Point Scope in the sub menu of Scope menu.
Specify Name.
Select a Type among Translational Displacement, Translational Velocity, Translational Acceleration, Rotational Displacement, Rotational Velocity, and Rotational Acceleration.
Select a Component type as Magnitude, X, Y, or Z.
Define Action Marker, Base Marker, and Reference Frame.
Check the Display option.
Click OK.