9.10.1.1. Type Option
Animation Status
Animation Status displays the selected component of the contour type.
Type
Type allows to select a contour type by choosing one of in the pull-down menu. The contour type supports several entities such as Displacement, Strain, Stress, and Contact Pressure, Acoustics ERP.
Component
Component allows to select a contour type component by choosing one of in the pull-down menu.
Displacement
TX, TY, TZ, TSUM, RX, RY, RZ, and RSUM can be outputted.
Each component is measured in the Node Reference Frame of Reference Node.
The displacement output names are defined as follows:
T* is the translational displacement.
R* is the rotational displacement.
TSUM is the magnitude of translational displacements.
RSUM is the magnitude of rotational displacements.
Definitions
Translation displacement
\(\mathbf{T}=\mathbf{A}_{r,t}^{T}({{\mathbf{r}}_{p,t}}-{{\mathbf{r}}_{r,t}})-\mathbf{A}_{r,0}^{T}({{\mathbf{r}}_{p,0}}-{{\mathbf{r}}_{r,0}})\)
Where, \(\mathbf{A}_{r,t}\) and \(\mathbf{A}_{r,0}\) are orientation matrices of the reference node (or reference marker) on the current simulation time \(t\) and initial time 0.0sec, respectively.
\({\mathbf{r}}_{p,t}\) and \({\mathbf{r}}_{p,0}\) are all arbitrary node position vector with respect to flexible body reference frame on the current simulation time \(t\) and initial time 0.0sec, respectively.
\({\mathbf{r}}_{r,t}\) and \({\mathbf{r}}_{r,0}\) are all position vector of reference node (or reference marker) with respect to flexible body reference frame on the current simulation time \(t\) and initial time 0.0sec, respectively.
Rotation displacement
\(\mathbf{R}=f_{^{bryant}}^{-1}(\mathbf{A}_{r,t}^{T}\mathbf{A}_{p,t}^{{}})-f_{^{bryant}}^{-1}(\mathbf{A}_{r,0}^{T}\mathbf{A}_{p,0}^{{}})\)
Where, \(\mathbf{A}_{r,t}\) and \(\mathbf{A}_{p,t}\) are orientation matrices of the reference node (or refrence marker) and an arbitrary node on the current time, respectively.
\(\mathbf{A}_{r,0}\) and \(\mathbf{A}_{p,0}\) are orientation matrices of the reference node (or refrence marker) and an arbitrary node on the initial time 0.0sec, respectively.
\(f_{^{bryant}}^{-1}\) means an inverse the Bryant angle (=EulerAngle 123).
Reference Marker
The reference marker function is available only for the displacement type function. If the user set a marker for the Reference Marker, then the Displacement results are calculated with the previous Translation and Rotation equations.
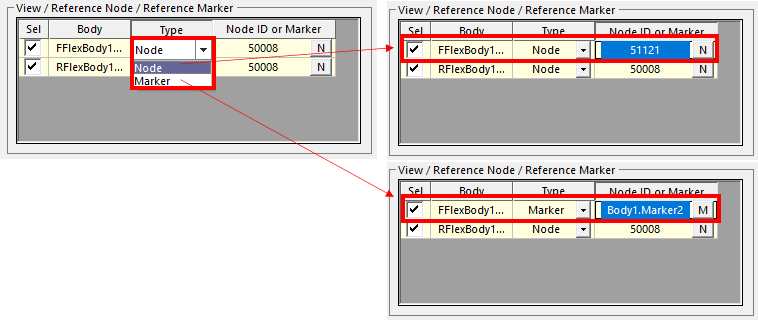
Figure 9.151 Reference Node / Reference Marker option on the Contour Dialog
Note
The Reference Node should be selected from its own nodes of the flexible body. But, there is no restriction for the Reference Marker option. Therefore, the Reference Marker can be a marker belongs to another body.
Strain
EX, EY, EZ, EXY, EYZ, EZX, E1, E2, E3, EINT, and EMISES can be outputted.
Stress [ \(Force/Length^2\) ]
SX, SY, SZ, SXY, SYZ, SZX, S1, S2, S3, SINT, and SMISES can be outputted.
In the case of FFlex Body, each component is measured in the Reference Marker defined in Output Regenerator. The default is Ground.Inertia Marker. For more information, click here
In the case of RFlex Body, each component is measured in the Body Reference Frame of RFlex Body. The reference frame cannot be modified.
To see the outputs for these components, the user must check options in Output File Setting
The stress and strain output names are defined as follows:
E*: strain
S*: stress
*X: x direction
*Y: y direction
*Z: z direction.
*XY: xy shear
*YZ: yz shear
*ZX: zx shear.
*1: first principal
*2: second principal
*3: third principal
*INT: intensity
*MISES: von-mises
_E: elastic strain
_P: plastic strain
_T: total strain
_THERMAL: thermal strain
Contact Pressure [ \(Force/Length^2\) ]
CP_EL and CP_CP can be outputted.
CP_EL: Contact pressure - Element formulation type
Contact pressure is computed using the element formulation of a contacted patch. The value is defined as a stress component of negative contact normal direction on the stress tensor.
This component is activated when using Geo Contact only.
CP_CP: Contact pressure - Contact force type
Contact pressure is computed that the contact normal force was divided by area of the contacted patch.
This component is activated when using Geo Contact only.
Display Vector
Display Vector shows the vector of the principal strain/stress as the arrows.
Display Vector: Is activated in case of selecting a component among E1, E2, E3 or S1, S2, S3.
Display Vector Size: Displays the proper size of the vector according to the element length of a flexible body.
This size is used the system unit of the assembly mode of RecurDyn.
It is possible to input the value in this section when the user wants to change the vector size.
The designated value can be used as the size of the maximum vector in case of the maximum stress or strain on the contour results. So, the size of other vectors can be calculated automatically in GUI based on the defined maximum size as shown in the Figure 9.152 below.
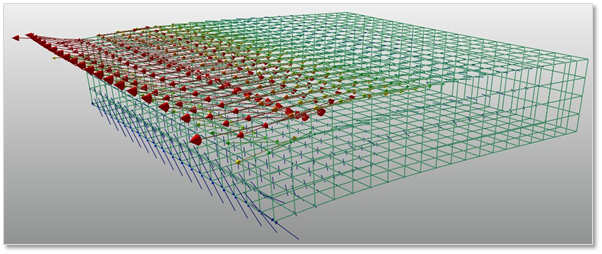
Figure 9.152 The vector display of the principle stress(S1)
The principal stress or strain in case of tension has the plus value, and its vector shows that the arrow heads are placed in the opposite directions each other in the point of a node. On the contrary, in case of compression, it has the minus value, and its vector shows that two arrows are looking at each other at a node as shown the Figure 9.153 below.
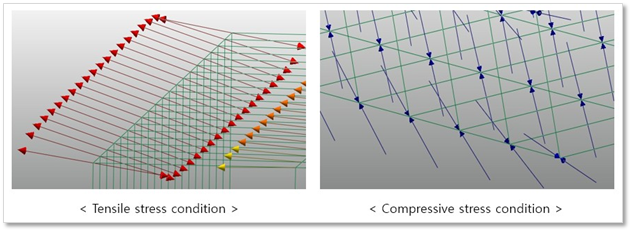
Figure 9.153 The comparison of two conditions
Uniform: Displays all vector as the same size that is defined in the Display Vector regardless of the magnitude of principal strain or stress.
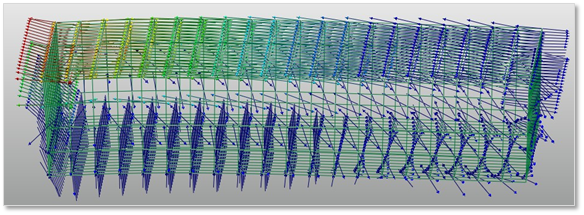
Figure 9.154 The applying the Uniform option to the vectors
Simple: Shows all vectors as the lines instead of the shapes.
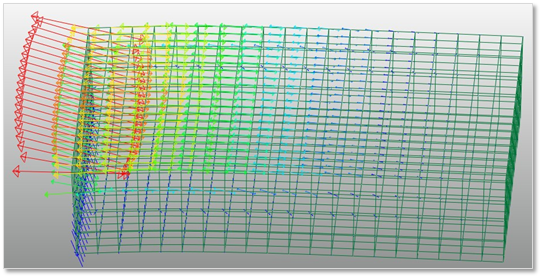
Figure 9.155 The applying the Simple option to the vectors
Note
RecurDyn recommends using the higher OpenGL version than 4.
Contact Surface Only
Contact Surface Only uses to view the stress of contour on the contact surface.
Contact Surface: Displays Contour to the patch set defined by the contact surface.
Contact Patches: Displays Contour to the patches generating the real contact in the patches defined by the contact surface. The FFlex contact supported this option is only Geo Contact.