6.3.1.2. Connector Page
This page changes the relation of force entity for base and action bodies.
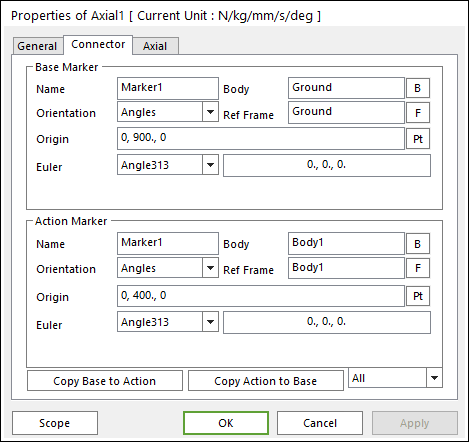
Figure 6.242 Force property page [Connector page]
Base and Action Marker: All points are measured with respect to Inertia Marker of ground.
Name: Defines the name of the marker.
Body: Defines the mother body of the marker.
Ref Frame: Defines the reference frame of force. The origin and orientation are measured with respect to the reference frame.
Origin: Defines the origin of the marker.
Euler Angle: Select 321 or 313 Euler Angles.
The Euler angle can be defined as a parametric value. If the user inputs the parametric value, the unit is Radian. Therefore, if the user wants to input a degree value, the user must add the “D” character such as “*.90D**” in Parametric Value.
Copy Base to Action: Copy the origin or orientation of the base marker to the action marker.
Copy Action to Base: Copy the origin or orientation of the action marker to the base marker.
Copy options:
All: Copy the origin and the orientation
Origin: Copy only the origin
Orientation: Copy only the orientation