29.8.1. Speed Sensor
This sensor finds the closest a segment of belt from the sensor center position.
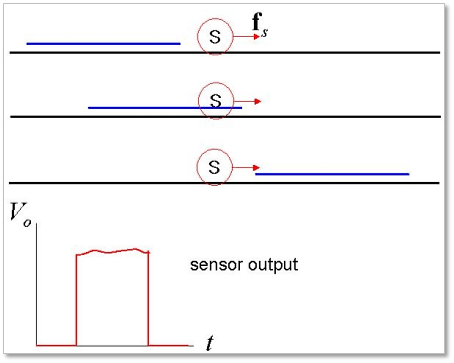
Figure 29.98 Speed Sensor
First, the sensor finds the closest a segment (or belt element) of belt from the sensor center position. And a position of the segment (or belt element) is checked whether the position is in the range of sensor. If the position is in the sensor, the velocity of the closest position of the segment (or belt element) is computed and the sensor output is computed. As shown in Figure 29.98, if a segment passes to the range of the sensor, the sensor output can be computed from the following equation.
\({{V}_{o}}=f_{s}^{T}({{V}_{c}}-{{V}_{s}})\)
- where,
- \({{V}_{o}}\): the result of sensor.\({{V}_{c}}\): the velocity of the closest position of belt segment (or belt element) in the range of the sensor.\({{V}_{s}}\): the velocity for the center position of sensor.\({{f}_{s}}\): the specified direction of the sensor.
29.8.1.1. Modeling Options
The user can create a speed sensor as follows.
Point, Direction, Distance
Point: Selects a point on a body to define the center of speed sensor.
Direction: Defines a direction of speed sensor.
Distance: Defines a range of region to measure output.
Note
The user should define the sensing target entity by using Speed Sensor property page.
Body, Point, Direction, Distance
Body: Selects a body to define the parent body of speed sensor.
Point: Selects a point on the assembly to define the center of speed sensor.
Direction: Defines a direction of speed sensor.
Distance: Defines a range of region to measure output.
Note
The user should define the sensing target entity by using Speed Sensor property page.
Assembled Body, Point, Direction, Distance
Assembled Body: Selects an assembly as a target entity.
Point: Selects a point on the assembly to define the center of speed sensor.
Direction: Defines a direction of speed sensor.
Distance: Defines a range of region to measure output.
Body, Assembled Body, Point, Direction, Distance
Body: Selects a body to define the parent body of speed sensor.
Assembled Body: Selects an assembly as a target entity.
Point: Selects a point on the assembly to define the center of speed sensor.
Direction: Defines a direction of speed sensor.
Distance: Defines a range of region to measure output.
29.8.1.2. Properties
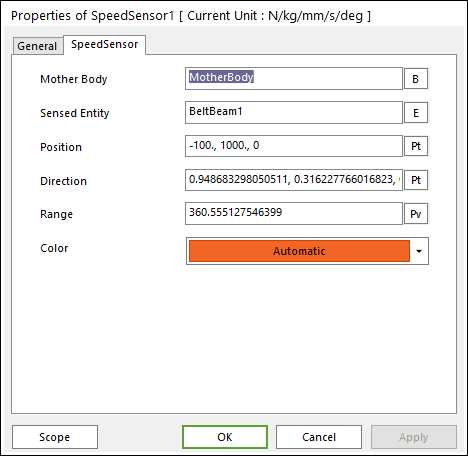
Figure 29.99 Speed Sensor property page
The Speed Sensor property page is shown in Figure 29.99. And its parameters are explained below.
Mother Body: Select the body that attached sensor.
Sensing Entity: Select the assembly of chain system to measure output.
Position: Enter the center position of sensor.
Range: Enter the range of region to measure output.
Color: Select the color of sensor.