20.6.4.4. State Space
The State Space block implements a state-space system which is defined by
\(\mathbf{\dot{x}}=\mathbf{A}\mathbf{x}+\mathbf{B}\mathbf{u}\)
\(\mathbf{y}=\mathbf{C}\mathbf{x}+\mathbf{D}\mathbf{u}\)
where, \(\mathbf{x}\) is the state vector, \(\mathbf{u}\) is the input signal vector, \(\mathbf{y}\) is the output signal vector, \(\mathbf{A}\), \(\mathbf{B}\), \(\mathbf{C}\), \(\mathbf{D}\) are matrix coefficients of the system.
Dialog box
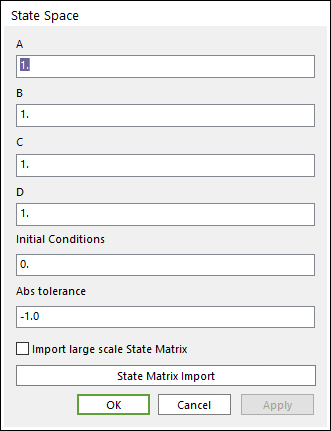
Figure 20.68 State Space dialog box
Parameter(s) |
Description |
\(\mathbf{A}\), \(\mathbf{B}\), \(\mathbf{C}\), \(\mathbf{D}\) |
Display the matrix coefficients of the system. |
Initial condition |
Displays the initial condition for the state vector. |
Abs tolerance |
Enter the value for the Absolute tolerance.
|
Import large scale StateMatrix |
When a State Matrix file made by RecurDyn/Linear is very large, this option does not display the data for \(\mathbf{A}\), \(\mathbf{B}\), \(\mathbf{C}\), \(\mathbf{D}\). |
State Matrix Import |
Displays the data in \(\mathbf{A}\), \(\mathbf{B}\), \(\mathbf{C}\), \(\mathbf{D}\) after reading a State Matrix file made by RecurDyn/Linear. |