6.3.2.8. Screw
A screw force generates three orthogonal translation and three orthogonal torques about the reference marker. This force applies action forces and torques to the action body, and corresponding reaction forces and torques are applied to the base body. The position and orientation of base marker are not used because the direction of force is defined by the reference marker.
6.3.2.8.1. Modeling Options
The user can create a force entity as follows.
Point, Point
Point: Selects a point on a base body. This point defines a location on which the reaction force is applied.
Point: Selects a point on an action body. This point defines a location on which the action force is applied.
Body, Body, Point, Point
Body: Selects a base body of screw force.
Body: Selects an action body of screw force.
Point: Selects a point on a base body. This point defines a location on which the reaction force is applied.
Point: Selects a point on an action body. This point defines a location on which the action force is applied.
6.3.2.8.2. Properties
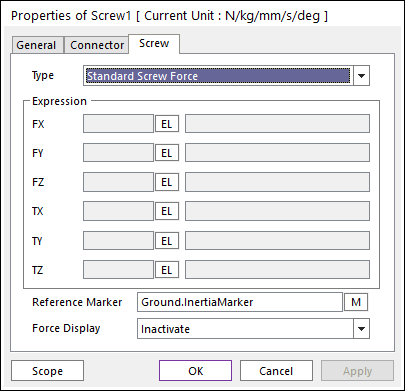
Figure 6.263 Screw property page
The magnitude of the screw force is calculated according to the following equations:
\(\begin{aligned} & {{F}_{a}}={{F}_{x}}\cdot {{x}_{rm}}+{{F}_{y}}\cdot {{y}_{rm}}+{{F}_{z}}\cdot {{z}_{rm}} \\ & {{T}_{a}}={{T}_{x}}\cdot {{x}_{rm}}+{{T}_{y}}\cdot {{y}_{rm}}+{{T}_{z}}\cdot {{z}_{rm}} \\ & {{F}_{b}}=-F{}_{a} \\ & {{T}_{b}}=-{{T}_{a}} \\ \end{aligned}\)
Where, the inputs into the equation are defined in the Translational Force and Rotational Force.
Type: Select a type of expression as Standard Screw Force or User Subroutine Screw Force.
Standard Screw Force: Defines by using the function expression.
User Subroutine Screw Force: Defines by using the user subroutine. For more information, click Screw Force USUB.
Expression: Creates an expression of a force. If the user defines the expression, the substance of expression is shown in the text box.
Reference Marker: The force and torque are specified in the coordinate system of reference marker.
Force Display: Displays the resultant force vector graphically on Working Window.