7.4.5. Contact
The lists of Contact include a result set about each contact force.
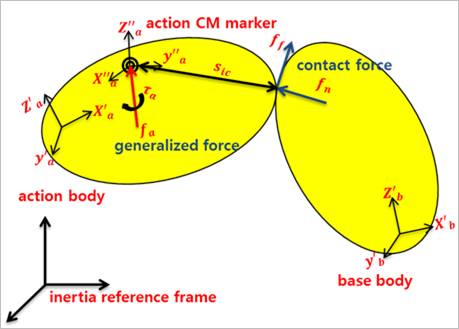
Figure 7.92 Definition of contact plot data
FM_ContactType: The magnitude of the translational force generalized at the center marker of action body due to the contact force acting on the contact point of action body.
FX_ContactType, FY_ContactType, FZ_ContactType: The x, y and z components of the translational force generalized at the center marker of action body due to the contact force acting on the contact point of action body in its center marker’s reference frame. In the case of Geo Contact and UV Sphere Contact, if using Generate the Contact Output File option, the marker defined in the option is used as a reference frame. And if not using Generate the Contact Output File option, Ground.Inertia Marker is used as a reference frame.
\(\mathbf{f}_a''=(\mathbf{A}_a\mathbf{C}_a)^T\mathbf{f}_a=(\mathbf{A}_a\mathbf{C}_a)^T(\mathbf{f}_n+\mathbf{f}_f)\)
If Global Reference Frame for RPLT option is used, then the reference frame of the FX, FY, and FZ is going to be set to the Ground.Inertia Marker.
\(\mathbf{f}_a=(\mathbf{f}_n+\mathbf{f}_f) = (\mathbf{A}_a\mathbf{A}_a) \mathbf{f}_a''\)
TM_ ContactType: The magnitude of the torque generalized at the center marker of action body due to the contact force acting on the contact point of action body.
TX_ContactType, TY_ContactType, TZ_ContactType: The x, y and z components of the torque generalized at the center marker of action body due to the contact force acting on the contact point of action body in its center marker’s reference frame.
\(\mathbf{\tau}_a''=(\mathbf{A}_a\mathbf{C}_a)^T\mathbf{\tau}_a=(\mathbf{A}_a\mathbf{C}_a)^T(\tilde{\mathbf{s}}_{ic}(\mathbf{f}_n+\mathbf{f}_f))\)
If Global Reference Frame for RPLT option is used, then the reference frame of the TX, TY, and TZ is going to be set to the Ground.Inertia Marker.
\(\mathbf{\tau}_a=\tilde{\mathbf{s}}_{ic}(\mathbf{f}_n+\mathbf{f}_f)=(\mathbf{A}_a\mathbf{C}_a)\mathbf{\tau}_a''\)
X_ContactPosition,Y_ContactPosition, Z_ContactPosition : The x,y and z components of the global contact position.
X_NormalDirection,Y_NormalDirection, Z_NormalDirection : The x,y and z components of the global contact normal direction.
X_TangentDirection,Y_TangentDirection, Z_TangentDirection: The x,y and z components of the global contact tangent direction. If the contact has a friction force, this value indicates a direction of the friction force.
Penetration: The contact penetration of \(\delta\) is always the minus value.
PenetrationVelocity: The derivative contact penetration of \(\dot{\delta}\) in the first time.
TangentVelocity: The relative velocity of \(\nu_t\) between the action and base contact points in the tangent direction.
FrictionCoef: The friction coefficient of the contact.
NormalForce: The normal force of the contact.
FrictionForce: The friction force of the contact.
PEN_Contact: For Cam2D, CamLine2D and Sphere in Sphere Contacts, the contact penetration of \(\delta\) is always the minus value.
DPEN_Contact: For Cam2D, CamLine2D and Sphere in Sphere Contacts, the derivative contact penetration of \(\dot{\delta}\) in the first time.
TVEL_Contact: For Cam2D and CamLine2D contacts, the relative velocity of \(\nu_t\) between the action and base contact points in the tangent direction
TVEL1_Contact, TVEL2_Contact: For Sphere in Sphere Contact, the relative velocities of \(\nu_t\) between the action and base contact points in the tangent directions.
NF_Contact: For Cam2D and CamLine2D Contacts, the contact normal force applied at the action contact point. The contact normal force applied the action contact point can be computed as follows.
\(f_n=-k|\delta|^{m1}=c|\delta|^{m3}\dot{\delta^{m2}}\)
FF_Contact: For Cam2D and CamLine2D Contacts, the contact friction force applied on the action contact point. The contact friction force applied the action contact point can be computed as follows.
\(f_f=-\mu(\nu_t)|f_n|\)
FF_Contact, FF2_Contact: For Sphere in Sphere Contact, the contact friction force applied to the action contact point.
DM_FloatBase: For Cam2D and CamLine2D Contacts and Sphere in Sphere Contact, the magnitude of translational displacement of the base contact point with respect to the reference frame of the base body.
DX_FloatBase, DY_FloatBase, DZ_FloatBase: For Cam2D and CamLine2D Contacts and Sphere in Sphere Contact, the x, y and z components of translational displacement of the base contact point with respect to the reference frame of base body.
DM_FloatAction: For Cam2D and CamLine2D Contacts, the magnitude of translational displacement of the action contact point with respect to the reference frame of action body.
DX_FloatAction, DY_FloatAction, DZ_FloatAction: For Cam2D and CamLine2D Contacts, the x, y and z components of translational displacement of the action contact point with respect to the reference frame of action body.
Base_Curve_Curvature: For Cam2D and CamLine2D Contact, it is the curvature of curve in the contact point.(if there is no contact, the curvature become a ZERO)
For a plane curve given parametrically in Cartesian coordinates as \(f(u)=(x(u),y(u))\), the curvature is
\[\begin{flalign} & \rho =\frac{| \ddot{y}\dot{x}-\ddot{x}\dot{y}|}{{{\left( {{{\dot{x}}}^{2}}+{{{\dot{y}}}^{2}} \right)}^{\frac{3}{2}}}} & \end{flalign}\]where dot denotes differentiation with respect to parameter \(u\).
Action_Curve_Curvature: For Cam2D and CamLine2D Contact, in Cam2D contact, an action curvature become a value of 1/radius of circle or sphere, in CamLine2D contact, it becomes a ZERO.