6.2.3.4. Orientation
An orientation joint constraints the marker of action body so that it cannot rotate with respect to a base body as shown in Figure 6.212. The action body is constrained relative to the base body. The axes of the coordinate systems must keep the same orientation. The location of the origins of the coordinate systems is not considered. The resulting degrees of freedom are three.
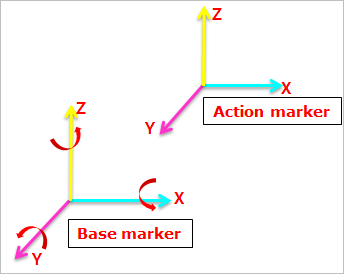
Figure 6.212 Definition of Orientation Joint
6.2.3.4.1. Modeling Options
The user can create a joint entity as follows.
Point
Point: Selects a point on two bodies to define the location of the orientation joint.
Body, Body, Point
Body: Selects a base body of the orientation joint.
Body: Selects an action body of the orientation joint.
Point: Selects a point to define the location of the orientation joint.
6.2.3.4.2. Properties
The user can only define the force display using the Joint page.
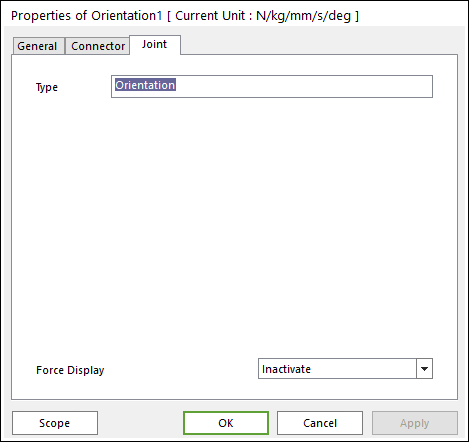
Figure 6.213 Orientation property page [Joint page]
Type: Shows the type of joint.
Force Display: Displays the resultant force vector graphically on Working Window.