22. Control
Practically all control systems that are implemented today are based on computer control.
A computer-controlled system can be described schematically as shown in Figure1.
Outputs from the GPlant are continuous-time signal and converted into digital signals by analog-to-digital (A-D) converter.
The conversion process is performed and controlled by selected sampling times.
The system computer:
Interprets the converted signals
Processes the measurements using a control algorithm
Gives new digital signals.
The generated signals from the control algorithm are also converted into analog signals for GPlant input by a digital-analog (D-A) converter.
The real time clock in the computer synchronizes the events.
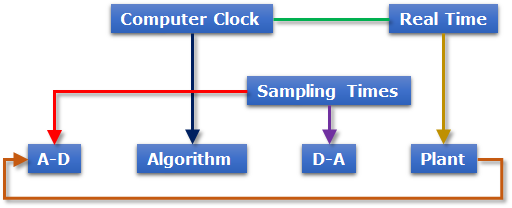
Figure 22.1 Schematic diagram of a computer controlled system
In the simulation of a computer-controlled system, design algorithms of controller and mechanical systems (so-called GPlants) should be evaluated simultaneously.
The control algorithm is easily designed by control design application software such as MATLAB/Simulink
The GPlant is constructed by mechanical system simulation software such as RecurDyn.
An interface toolkit such as the RecurDyn/Control is required to communicate between the control system design and mechanical system design software. The schematic diagram of RecurDyn/Control is shown in Schematic diagram of RecurDyn/Control.
RecurDyn simulates the GPlant model and the control design software simulates the control algorithm in this co-simulation architecture.
During the co-simulation between RecurDyn and the control system design software, the result outputs from RecurDyn and the control system design tools are passed to each other at a constant sampling time.
Thus the outputs from RecurDyn are assumed to remain at the same value during the sampling period.
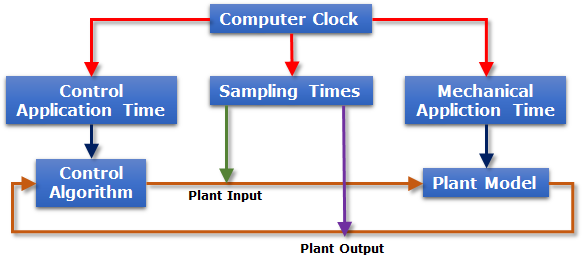
Figure 22.2 Schematic diagram of RecurDyn/Control