\(\dot{\mathbf{X}}\) represents the state variables of the plant.
\(\mathbf{U}\) represents the plant inputs.
\(\mathbf{Y}\) represents the plant outputs.
\(\mathbf{A}\), \(\mathbf{B}\), \(\mathbf{C}\) and \(\mathbf{D}\) are state matrices.
You can define the plant inputs and plant outputs. RecurDyn/Solver automatically determines the states. But if you want to make arbitrary coordinate states, you change states by modeling plant input force in the arbitrary coordinate.
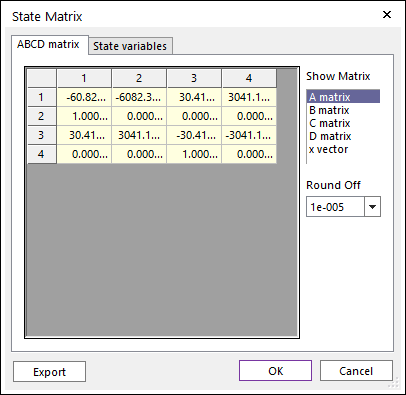
Step to Operate State Matrix
Check the Included State Matrix option in the Pre-Analysis dialog box, the Static Analysis dialog box, the Dynamic/Kinematic Analysis dialog box.
Simulate the model.
Click State Matrix icon of the Post Tool group in the Analysis tab.