30.3.2. Assembly Information
The assembly information contains all information of a chain system, that is, contact parameters, bushing characteristics, passing bodies, the number of links, link plate shape used at contact, force output information. The bodies which are in contact with chain links can be added or deleted from this dialog in Passing Entity List page. Also, user can choose the chain link plate type as explained in Roller Link, Multiplex Chain Link, and Silent Chain Link.
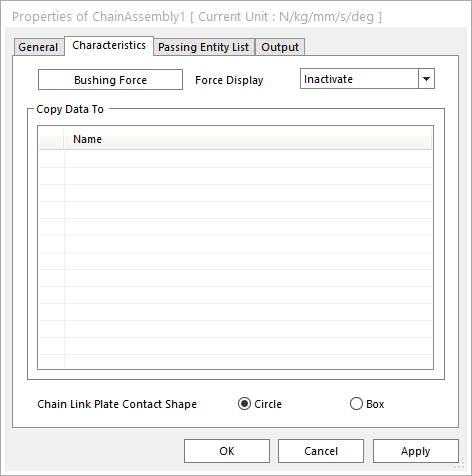
Figure 30.88 Assembly Information property page [Characteristics page]
The Assembly Information property page is shown in Figure 30.88. The parameters are explained below.
Bushing Force: Defines characteristic values to connect between two links. Refer to Bushing Force.
Force Display: Specifies a type as Inactivate, Action, Base, and Both. It graphically displays the force and torque vectors generated in bushing of all links which are selected in Output tab option as shown in the below figure.
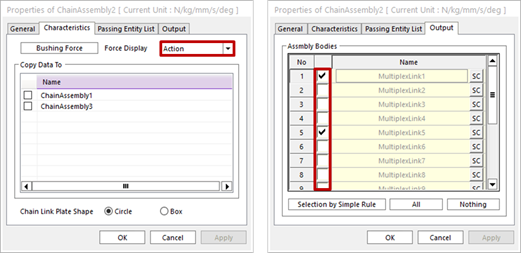
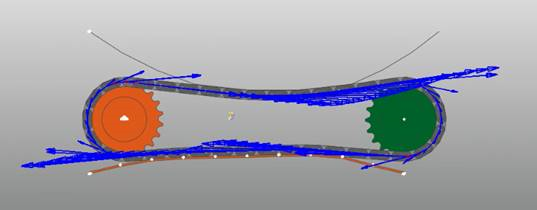
Figure 30.89 Example of Bushing Force Display
Copy Data: For more than two chain system, the user can easily apply same characteristics to another chain system.
Chain Link Plate Contact Shape: Usually, a roller chain link has two type link plate shapes (Circle and Box). Chain Link Plate Contact Shape is applied to only contact as shown in Figure 30.90. The shape of chain link including mass and inertia can modified in the chain link property page independently.
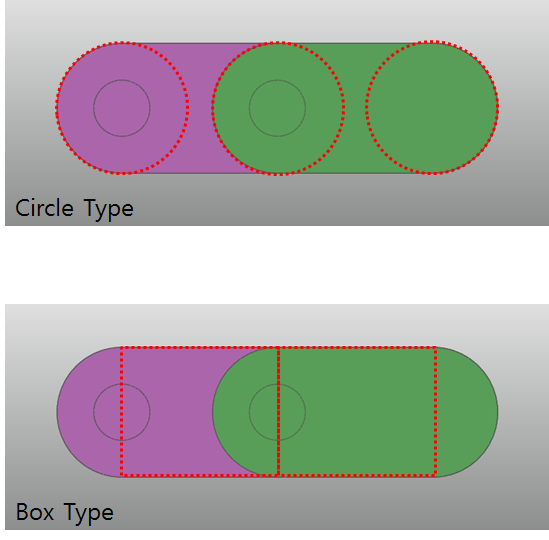
Figure 30.90 Contact Points