9.9.1.3. Contact Force Name Page
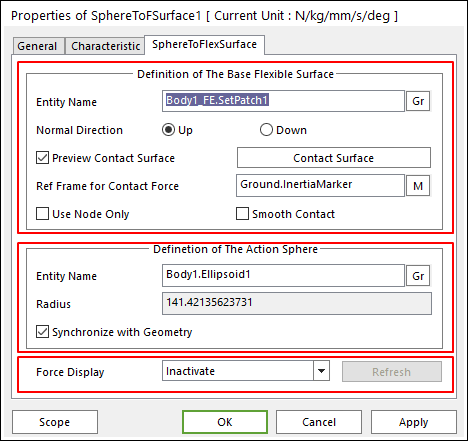
Figure 9.133 Properties of SphereToFSurface dialog box
Definition of The Base Surface: Allows you to select the base contact geometry. The entities vary according to each contact force type.
Definition of The Action Surface: Allows you to select the action contact geometry. The entities vary according to each contact force type.
Force Display: Graphically displays the resultant force vector on the view window.
Inactive: The force graphical display is inactive.
Action: The force and torque which is generalized on the action body due to a contact force is displayed at a position. If the action body is a:
Flexible body, then the resultant contact force is displayed at the specified reference frame for contact.
Rigid body, then the contact force is displayed at the center marker of the action body.
\(Q_a=\left\{ \begin{matrix} f_a \\ \tau_a \end{matrix} \right\} = \left\{\begin{matrix} f_n+f_f \\ \tilde{s}_{ac} (f_n+f_f) \end{matrix} \right\}\)
Base: The force and torque which is generalized on the base body due to a contact force is displayed at a position. If the base body is a:
Flexible body, then the resultant contact force is displayed at the specified reference frame for contact.
Rigid body, then the contact force is displayed at the center marker of the base body.
\(Q_b=\left\{ \begin{matrix} f_b \\ \tau_b \end{matrix} \right\} = \left\{\begin{matrix} -f_a \\ -\tilde{s}_{bc} (f_n+f_f) \end{matrix} \right\}\)
Both: Simultaneously displays the action and reaction forces at the specified positions.
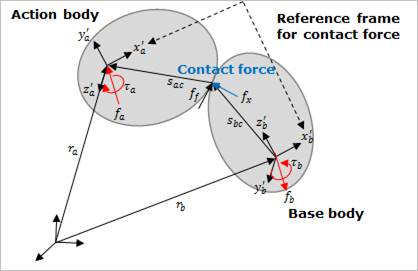
Figure 9.134 Definition of contact force
Refresh: When the action or base contact geometry is changed, you can refresh the preview of information of specified contact geometry as using this function.
Contact surface
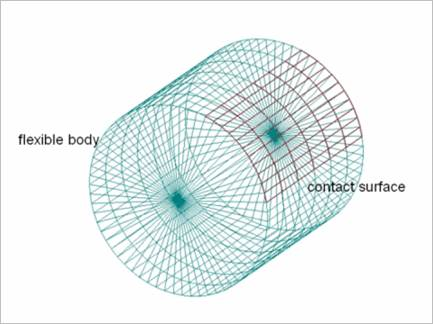
Figure 9.135 contact surface
Contact curve
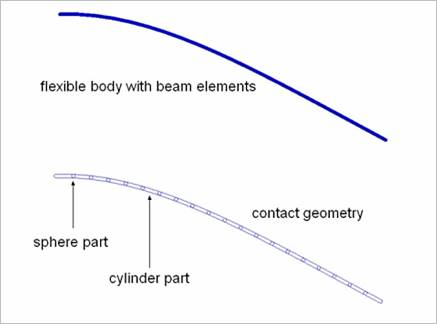
Figure 9.136 Contact curve
A FFlex body such as a cable or wire, or a beam structure with circular cross section is used for a contact.
These Flexible bodies:
Have a cylindrical surface.
Is modeled with 1D finite element of beam.
The beam elements is:
Defined as a patch set
Used for flexible curve contacts.
The cross section of the curve for a contact is assumed as a circle.
So, the contact geometry can be approximated to the cylinder and sphere as shown in Figure 9.136.
Note that a contact point in the curve is linearly interpolated from two nodes.