25.8.2. Sheet To Sphere Contact
A sheet is contacted with the sphere geometry. The sheet is divided into several rectangular patches and the sphere is dealt with analytic equation. The edge or vertex of a rectangular patch of the sheet is contacted with the sphere geometry. If the sheet is contacted with sphere, the contact normal and friction forces are generated at the contact points as shown in Figure 25.72. The output force is the Base force which is acting on Base body Center Marker. The magnitude of contact force is equal with summation of forces of nodes on sheet.
A Sheet to Sphere Contact generates a contact force between a sheet and a sphere.
The sheet and sphere must belong to two different bodies.
The contact force can be not only linear or exponential but also nonlinear spline characteristics to the contact penetration and its velocity.
The base sphere and action sheet are approximated as triangular patches and rectangular patches as shown in Figure1, respectively.
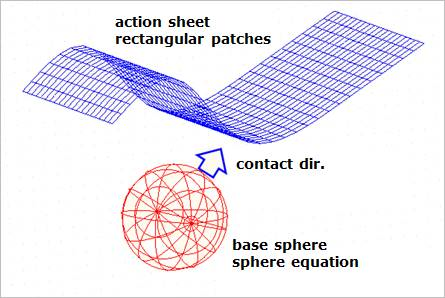
Figure 25.72 Example of a sheet to sphere contact
25.8.2.1. Modeling Options
Sphere, Sheet Group
Sphere: Select a sphere geometry to define a base entity.
Sheet Group: Selects a sheet group to define an action entity.
25.8.2.2. Properties
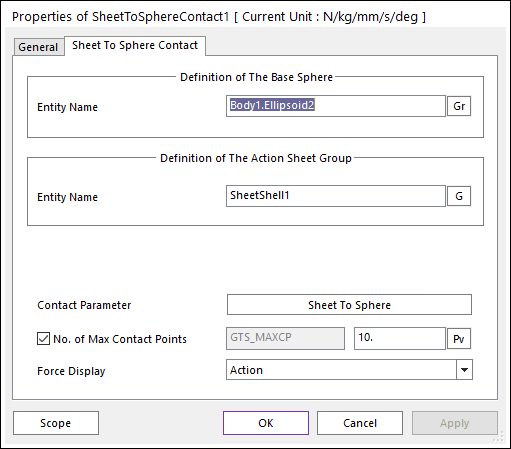
Figure 25.73 Sheet To Sphere Contact property page
Entity Name of The Base Sphere: Select the base sphere by using Gr.
Entity Name of The Action Sheet Group: Select the action sheet by using G.
Contact Parameter: Allows the user to modify contact parameters by clicking Sheet To Sphere. In this dialog box, the user can modify the contact parameters of contact forces applied between the sheet and the sphere. Refer to Contact Formulations for MTT3D.
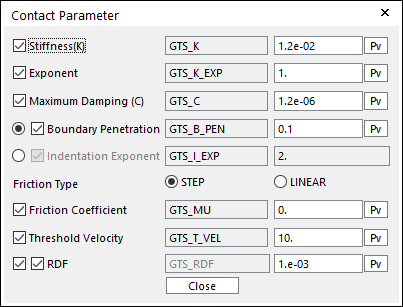
Figure 25.74 Contact Parameter dialog box
No. of Max Contact Points: Defines the number of max contact point for output. User can define this value from 1 to 5000. This value only affects Force Display and RPLT data about the contact points. The default value is 10.
Force Display: Graphically displays the all contact force vectors (the sum of the normal and tangential contact force) at each contact point up to the No. of Max Contact Point.