4.7.1.3.2. Velocity
Marker in { } is optional. If the user does not define optional markers, those markers use Ground.InertiaMarker. The marker name is defined as follows:
(m1{,m2}{,m3}{,m4}) : (bodyname.markername{,bodyname.markername}{,bodyname.markername}{,bodyname.markername}).
m1 becomes action marker.
If m2 is defined, m2 becomes base marker.
If m3 is defined, m3 becomes reference marker.
If m4 is defined, m4 becomes the reference marker which is considering a change of Orientation.
Relative velocity between action and base marker(\({{\mathbf{\dot{d}}}^{'}}\)) is computed like below formula.
\({{\mathbf{\dot{d}}}^{'}}=-\mathbf{A}_{m3}^{T}\left[ {{\mathbf{\omega }}_{m4}}\times \left( {{\mathbf{r}}_{m1}}-{{\mathbf{r}}_{m2}} \right) \right]+\mathbf{A}_{m3}^{T}\left( {{{\mathbf{\dot{r}}}}_{m1}}-{{{\mathbf{\dot{r}}}}_{m2}} \right)\)
\(\mathbf{r}\): Position vector of marker with respect to ground Inertia.
\(\mathbf{A}\): Orientation matrix of marker with respect to ground inertia.
\(\mathbf{\dot{r}}\): Velocity vector of marker with respect to ground inertia.
\(\mathbf{\omega }\): Angular velocity vector of marker with respect to ground inertia.
Generally, m3 is the same as m4. Then, above formula means velocity vector of action marker relative to base marker in the view of reference marker.
4.7.1.3.2.1. VM
The VM function returns the absolute velocity of one marker or the absolute value of the relative velocity between two markers.
Format
VM(Marker1{, Marker2}{, Marker3})
Arguments definition
Marker1 |
The name or argument number of a marker to be calculated |
Marker2 |
|
Marker3 |
|
Formulation
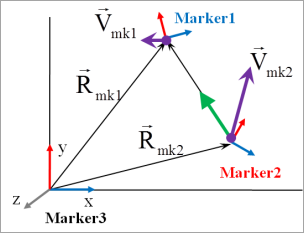
\(\text{VM}=\sqrt{{{\left( {}^{(\text{mk3})}{{{\vec{V}}}_{\text{mk1}}}-{}^{(\text{mk3})}{{{\vec{V}}}_{\text{mk2}}} \right)}^{2}}}\)
\({}^{(\text{mk3})}{{\vec{V}}_{\text{mk1}}}\): Marker1’s velocity vector from Marker3
\({}^{(\text{mk3})}{{\vec{V}}_{\text{mk2}}}\): Marker2’s velocity vector from Marker3
Example
4.7.1.3.2.2. VR
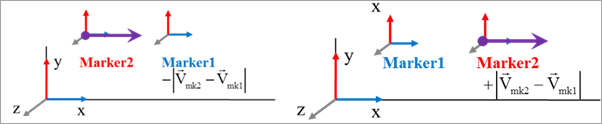
The VR function returns the change in two markers’ relative velocity and/or breakaway direction. A positive value (+) indicates that the distance between the two markers is growing. A negative value (-) value indicates that the distance between the two markers is shrinking.
Format
VR(Marker1{, Marker2}{, Marker3})
Arguments definition
Marker1 |
The name or argument number of a marker to be calculated |
Marker2 |
|
Marker3 |
|
Formulation
\(\text{VR}=\frac{\left( \left[ ^{\text{(mk3)}}{{{\vec{V}}}_{\text{mk1}}}{{-}^{\text{(mk3)}}}{{{\vec{V}}}_{\text{mk2}}} \right]\cdot \left[ {{{\vec{R}}}_{\text{mk1}}}-{{{\vec{R}}}_{\text{mk2}}} \right]\, \right)}{\text{DM}({{{\vec{R}}}_{\text{mk1}}},{{{\vec{R}}}_{\text{mk2}}})}\)
\(^{\text{(mk3)}}{{\vec{V}}_{\text{mk1}}}\): Marker1’s velocity vector from Marker3
\(^{\text{(mk3)}}{{\vec{V}}_{\text{mk2}}}\): Marker2’s velocity vector from Marker3
\(\text{DM}({{\vec{R}}_{\text{mk1}}},{{\vec{R}}_{\text{mk2}}})\): Distance from the \({{\vec{R}}_{\text{mk2}}}\) vector to the \({{\vec{R}}_{\text{mk1}}}\) vector
Example
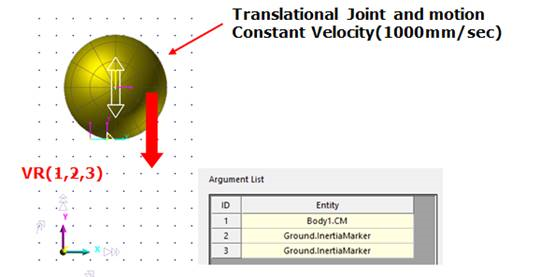
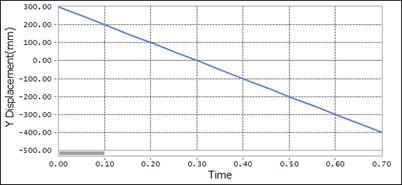
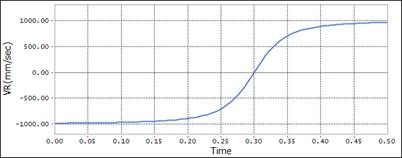
As shown in the following figure, Body1 is placed at (50,300,0) and a translational joint is modeled. This joint is assigned a motion velocity of 1000 mm/sec. By applying the VR function for the InertiaMarker and CM marker to InertiaMarker and Body1, the displacement in the y direction and the VR function results are retrieved, as shown in the following graphs. One of the key Examples of a real life application of the VR function is an expression-used to model dampers (shock Absorbers) on automobile suspension systems.
4.7.1.3.2.3. VX
The VX function returns the x-direction velocity for one marker or the relative velocity of two markers in the x-direction.
Format
VX(Marker1{, Marker2}{, Marker3}{, Marker4})
Arguments definition
Marker1 |
The name or argument number of a marker to be calculated |
Marker2 |
|
Marker3 |
|
Marker4 |
|
Formulation
\(\text{VX}=\left( \left[ ^{(mk4)}{{{\vec{V}}}_{mk1}}{{-}^{(mk4)}}{{{\vec{V}}}_{mk2}} \right]\cdot {{{\hat{x}}}_{mk3}}\, \right)\)
\({}^{(\text{mk4})}{{\vec{V}}_{\text{mk1}}}\): Velocity vector of Marker1 relative to Marker4’s angular velocity
\({}^{(\text{mk4})}{{\vec{V}}_{\text{mk2}}}\): Velocity vector of Marker2 relative to Marker4’s angular velocity
\({{\hat{x}}_{\text{mk3}}}\): x-direction unit vector of Marker3
Example
4.7.1.3.2.4. VY
The VY function returns the y direction velocity for one marker or the relative velocity of two markers in the y direction.
Format
VY(Marker1{, Marker2}{, Marker3}{, Marker4})
Arguments definition
Marker1 |
The name or argument number of a marker to be calculated |
Marker2 |
|
Marker3 |
|
Marker4 |
|
Formulation
\(\text{VY}=\left( \left[ ^{\text{(mk4)}}{{{\vec{V}}}_{\text{mk1}}}{{-}^{\text{(mk4)}}}{{{\vec{V}}}_{\text{mk2}}} \right]\cdot {{{\hat{y}}}_{\text{mk3}}}\, \right)\)
\({}^{(\text{mk}4)}{{\vec{V}}_{\text{mk1}}}\): Velocity vector of Marker1 relative to Marker4’s angular velocity
\({}^{(\text{mk}4)}{{\vec{V}}_{\text{mk2}}}\): Velocity vector of Marker2 relative to Marker4’s angular velocity
\({{\hat{y}}_{\text{mk3}}}\): y-direction unit vector of Marker3
Example
4.7.1.3.2.5. VZ
The VZ function returns the z-direction velocity for one marker or the relative velocity of two markers in the z-direction.
Format
VZ(Marker1{, Marker2}{, Marker3}{, Marker4})
Arguments definition
Marker1 |
The name or argument number of a marker to be calculated |
Marker2 |
|
Marker3 |
|
Marker4 |
|
Formulation
\(\text{VZ}=\left( \left[ ^{\text{(mk4)}}{{{\vec{V}}}_{\text{mk1}}}{{-}^{\text{(mk4)}}}{{{\vec{V}}}_{\text{mk2}}} \right]\cdot {{{\hat{z}}}_{\text{mk3}}}\, \right)\)
\({}^{(\text{mk}4)}{{\vec{V}}_{\text{mk1}}}\): Velocity vector of the Marker1 relative to Marker4’s angular velocity
\({}^{(\text{mk}4)}{{\vec{V}}_{\text{mk2}}}\): Velocity vector of the Marker2 relative to Marker4’s angular velocity
\({\hat{z}}_{\text{mk3}}\): z-direction unit vector of Marker3
Example
4.7.1.3.2.6. WM
The WM function returns the absolute value of a marker’s angular velocity or the relative angular velocity between two markers.
Format
WM(Marker1{, Marker2})
Arguments definition
Marker1 |
The name or argument number of a marker to be calculated |
Marker2 |
|
Formulation
\(\text{WM}={{\left( \left[ {{{\vec{\omega }}}_{\text{mk1}}}-{{{\vec{\omega }}}_{\text{mk2}}} \right]\cdot \left[ {{{\vec{\omega }}}_{\text{mk1}}}-{{{\vec{\omega }}}_{\text{mk2}}} \right]\, \right)}^{1/2}}\)
\({{\vec{\omega }}_{\text{mk1}}}\): Marker1’s angular velocity vector from the InertiaMarker
\({{\vec{\omega }}_{\text{mk2}}}\): Marker2’s angular velocity vector from the InertiaMarker
Example
4.7.1.3.2.7. WX
The WX function returns one marker’s x-axis angular velocity or the x-axis relative angular velocity between two markers.
Format
VX(Marker1{, Marker2}{, Marker3})
Arguments definition
Marker1 |
The name or argument number of a marker to be calculated |
Marker2 |
|
Marker3 |
|
Formulation
\(\text{WX}=\left[ {{{\vec{\omega }}}_{\text{mk1}}}-{{{\vec{\omega }}}_{\text{mk2}}} \right]\cdot {{\hat{x}}_{\text{mk3}}}\)
\({{\vec{\omega }}_{\text{mk1}}}\): Marker1’s angular velocity vector from the InertiaMarker
\({{\vec{\omega }}_{\text{mk2}}}\): Marker2’s angular velocity vector from the InertiaMarker
\({{\hat{x}}_{\text{mk3}}}\): x-direction unit vector of Marker3
Example
4.7.1.3.2.8. WY
The WY function returns one marker’s y-axis angular velocity or the y-axis relative angular velocity between two markers.
Format
VX(Marker1{, Marker2}{, Marker3})
Arguments definition
Marker1 |
The name or argument number of a marker to be calculated |
Marker2 |
|
Marker3 |
|
Formulation
\(\text{WY}=\left[ {{{\vec{\omega }}}_{\text{mk1}}}-{{{\vec{\omega }}}_{\text{mk2}}} \right]\cdot {{\hat{y}}_{\text{mk3}}}\)
\({{\vec{\omega }}_{\text{mk1}}}\): Marker1’s angular velocity vector from the InertiaMarker
\({{\vec{\omega }}_{\text{mk2}}}\): Marker2’s angular velocity vector from the InertiaMarker
\({{\hat{y}}_{\text{mk3}}}\): y-direction unit vector of Marker3
Example
4.7.1.3.2.9. WZ
The WZ function returns one marker’s z-axis angular velocity or the z-axis relative angular velocity between two markers.
Format
WZ(Marker1{, Marker2}{, Marker3})
Arguments definition
Marker1 |
The name or argument number of a marker to be calculated |
Marker2 |
|
Marker3 |
|
Formulation
\(\text{WZ}=\left[ {{{\vec{\omega }}}_{\text{mk1}}}-{{{\vec{\omega }}}_{\text{mk2}}} \right]\cdot {{\hat{z}}_{\text{mk3}}}\)
\({{\vec{\omega }}_{\text{mk1}}}\): Marker1’s angular velocity vector from the InertiaMarker
\({{\vec{\omega }}_{\text{mk2}}}\): Marker2’s angular velocity vector from the InertiaMarker
\({{\hat{z}}_{\text{mk3}}}\): z-direction unit vector of Marker3
Example