30.6.2. Revolute Connector
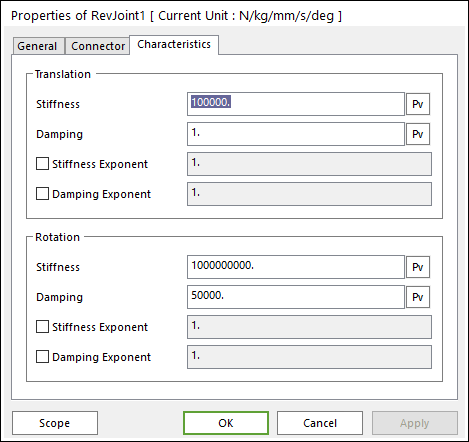
Figure 30.101 Revolute Connector property page [Characteristics page]
The revolute connector generates the following force and torque applied to the action marker:
\(\begin{aligned} & \left[ \begin{matrix} {{F}_{ax}} \\ {{F}_{ay}} \\ {{F}_{az}} \\ {{T}_{ax}} \\ {{T}_{ay}} \\ {{T}_{az}} \\ \end{matrix} \right]=-\left[ \begin{matrix} {{K}_{TRA}} & 0 & 0 & 0 & 0 & 0 \\ 0 & {{K}_{TRA}} & 0 & 0 & 0 & 0 \\ 0 & 0 & {{K}_{TRA}} & 0 & 0 & 0 \\ 0 & 0 & 0 & {{K}_{ROT}} & 0 & 0 \\ 0 & 0 & 0 & 0 & {{K}_{ROT}} & 0 \\ 0 & 0 & 0 & 0 & 0 & {{K}_{ROT}} \\ \end{matrix} \right]\left[ \begin{matrix} {{x}^{k1}} \\ {{y}^{k2}} \\ {{z}^{k3}} \\ \theta _{ab1}^{l1} \\ \theta _{ab2}^{l2} \\ \theta _{ab3}^{l3} \\ \end{matrix} \right]-\left[ \begin{matrix} {{C}_{TRA}} & 0 & 0 & 0 & 0 & 0 \\ 0 & {{C}_{TRA}} & 0 & 0 & 0 & 0 \\ 0 & 0 & {{C}_{TRA}} & 0 & 0 & 0 \\ 0 & 0 & 0 & {{C}_{ROT}} & 0 & 0 \\ 0 & 0 & 0 & 0 & {{C}_{ROT}} & 0 \\ 0 & 0 & 0 & 0 & 0 & {{C}_{ROT}} \\ \end{matrix} \right]\left[ \begin{matrix} {{V}_{x}}^{m1} \\ {{V}_{y}}^{m2} \\ {{V}_{z}}^{m3} \\ \omega _{ab1}^{n1} \\ \omega _{ab2}^{n2} \\ \omega _{ab3}^{n3} \\ \end{matrix} \right] \\ & \\ & {{F}_{b}}=-{{F}_{a}} \\ & {{T}_{b}}=-{{T}_{a}}-L\times {{F}_{a}} \\ \end{aligned}\)
For more information, click here.
Note
In RecurDyn/Solver, Rotation stiffness and damping coefficients are converted into radian although model unit is defined in degree. When the user define the values which they are in radian, the user must change an angle unit as radian in the general tab of Properties of RevJoint dialog box.